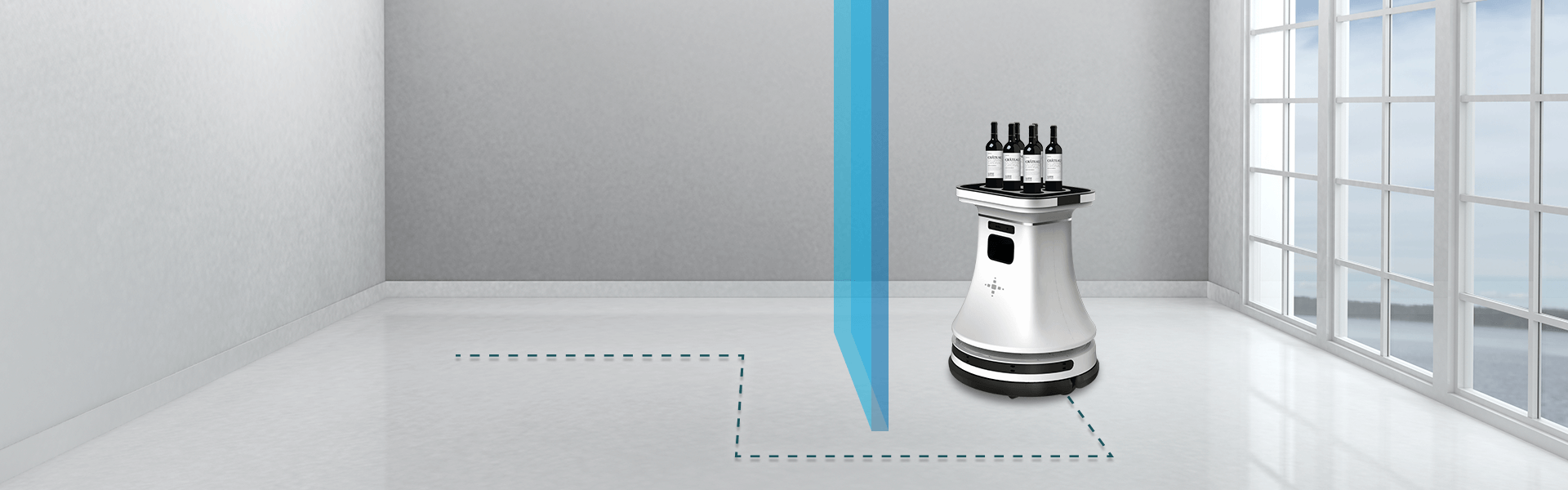

虚拟墙技术基于纯软件方式,无需额外辅助铺设
不需要改变应用场地的实际环境
即可实现移动机器人的虚拟墙避障,限制机器人的活动范围
同时支持物理磁轨隔断(选配)

虚拟墙技术可视具体环境情况灵活切换、平移或者变换虚拟墙的位置和形状 适用于多种场景,不存在人工铺设和信号的误差,成本低,精度高
机器人在移动过程中,遇到虚拟墙会自动绕行
会重新智能避障,规划和导航


思岚科技官方微信


