













Slamtec Robot Base - Supply SDK
- Apollo
- Apollo

SLAMTEC
Key Features
SUMMARY
Apollo Overview
BASE
Highlights
High configuration lidar sensor
With an environmental detection radius greater than 25m, Apollo constantly scans its surroundings and provides real-time map data to construct high-precision maps, enabling autonomous route planning and navigation based on the map data.

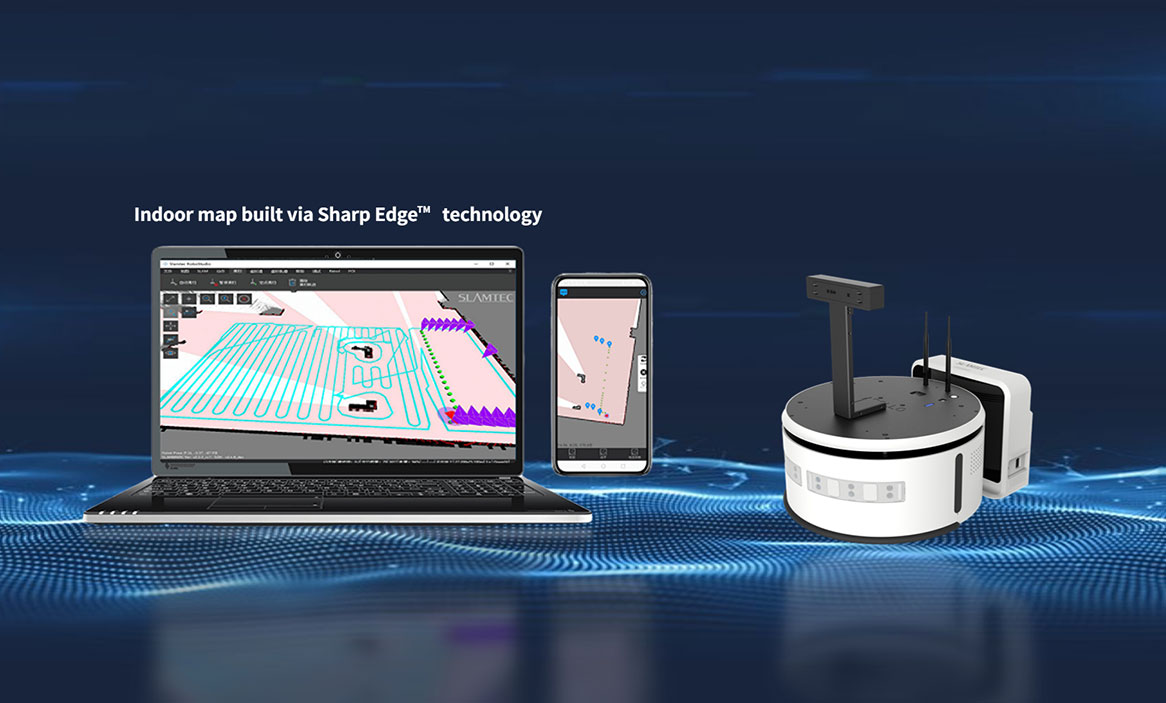
Autonomous Mapping and Navigation
Apollo is capable of autonomous operation without the need for human intervention. Equipped with SharpEdge technology, it can construct high-precision maps, determine optimal paths, and navigate to designated locations using multi-route patrol mode.

Multi-sensor Fusion
In addition to the lidar sensors, Apollo is equipped with depth cameras, ultrasonic, and anti-drop sensors. The fusion and navigation of multi-sensor data allow the robot to flexibly respond to complex scenes.

Autonomous Recharging
Apollo supports scheduled charging with external scheduling and also enables autonomous navigation and localization, allowing it to automatically return to the charging station for charging.

Cloud-based Remote Management
Based on the SLAMTEC RoboCloud service, remote management of registered Apollo platforms can be achieved to enable more extended functionalities.

Application Development
Apollo is a fully open software and hardware platform that offers external hardware support. Developers can use the Slamware SDK2.0 for business logic application development, and it supports Windows/Linux/Android/iOS development environments.

Simple and Efficient Operation

Measurement
Dimensions
| Height: 565mm | Width: 500mm | Weight: 47kg |





Contact Us
If you have any questions or suggestions, please leave a message, we will get in touch with you within 24 hours!