














- SLAMTEC Blog
Techno Blog from Slamtec
- SLAMTEC Blog

Strong Alliance | Hermes Robot Mobile Chassis Redefines Building Delivery
Haiyan is equipped with Hermes, a robot mobile chassis developed by SLAMTEC, enabling the robot to achieve delivery capabilities in high-dynamic environment changes, complex pedestrian flows, obstacle avoidance, and high-transparency glass door scenarios. It can freely shuttle between buildings to complete deliveries.

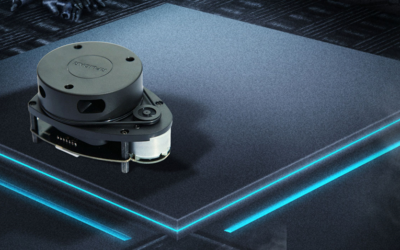
RPLIDAR A3: Advanced Triangulation LiDAR for Extended Range and Reliability
The RPLIDAR A3M1 is a low-cost 360-degree 2D laser scanner (LIDAR) solution developed by SLAMTEC. Collects up to 16,000 laser samples per second ranging at high rotational speeds. It is also equipped with SLAMTEC’s patented OPTMAG technology, which breaks through the life limit of traditional lidar and enables the system to work stably for a long time.

Hermes Debuts in Singapore Milipol Asia-Pacific Adorned in Blue Battle Armor, Empowering Smart Security
On April 5, 2024, the 10th edition of Milipol Asia-Pacific, the International Exhibition of Military and Police Forces, concluded at the Sands Expo & Convention Centre in Singapore. Hundreds of exhibitors from around the world showcased the latest security, anti-terrorism, and criminal investigation technologies, solutions, and related products, empowering new international methods in security and counter-terrorism.

SLAMTEC’s Huang Jueshen: Enabling Robots to ‘See’ Clearly and Move More Intelligently
Introduction: Digitization and intelligentization are comprehensively reshaping industrial production processes, leading to the emergence of numerous dark horse enterprises in the field of intelligent manufacturing. Driven by the combined demands of industry and robotics, the application market for LiDAR, a sensing hardware terminal, demonstrates a potential market value exceeding hundreds of billions of yuan.

Multiple Sensor Combinations Required for Modern Robot Obstacle Avoidance
With the continuous evolution of technology, obstacle avoidance capability has become one of the key development areas for robots. In order to achieve intelligent obstacle avoidance for robots, various advanced sensors have emerged. This article will delve into the role of key sensors in enhancing robot navigation performance.
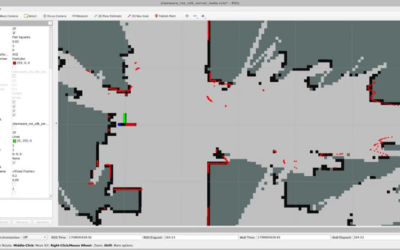
【Tutorial】Introduction Guide to SLAMWARE ROS SDK
ROS, as one of the most widely used infrastructures in the robotics industry, is the preferred framework for many users developing robot applications. If you want to integrate SLAMWARE’s robot chassis or SLAMKit mapping and localization solutions into a system developed based on ROS, what is the most convenient method? ROS SDK is designed for this purpose. This article will introduce you to the basic architecture, deployment methods, and application examples of ROS SDK.

Common Questions and Answers about SLAMTEC Products
一.RPLIDAR
Q: Why can’t the radar connect?
A: Please check if the corresponding USB option is selected correctly. When adding a radar connection, make sure to choose the correct COM port. For example, if you’ve plugged in a radar and it has been assigned COM4, then select COM4 in the USB options, and proceed with the connection startup.

Capturing Environmental Details Quickly with a More ‘Intelligent’ Lidar
In recent years, the rapid advancement of low-speed unmanned driving applications in specific scenarios has been observed. The maturity of lidar, serving as a core sensor, is crucial for the practical implementation of low-speed unmanned driving. Moreover, compared to radar products used in autonomous vehicles, lidar products have higher requirements for detecting environmental details.

When SLAMTEC RPLIDAR S2E Meets Nvidia’s Autonomous Robot Platform Nova Carter AMR
NVIDIA has launched a new autonomous robot platform called Nova Carter AMR on its official website. It is a highly customizable and flexible autonomous driving development platform powered by NVIDIA Nova Orin. It enables accelerated computing for ROS 2 and features 360° complete perception capabilities from cameras and LiDAR sensors

The Application of SLAMTEC LiDAR Sensors
SLAMTEC is a company dedicated to the research and production of LiDAR technology. LiDAR sensors utilize laser beams to measure distances to targets and generate high-resolution maps. They find wide applications across various sectors including catering, hospitality, government affairs, business, education, healthcare, among others, helping businesses reduce costs and increase efficiency. Below are some application areas of SLAMTEC LiDAR sensors.
The outstanding application of RPLIDAR A1 in robotic vacuum cleaners
In the realm of smart homes, robotic vacuum cleaners are becoming an indispensable part of modern living. To enhance the environmental perception and navigation performance of these devices, Slamtec Technology has introduced the RPLIDAR A1, a laser radar product that incorporates advanced laser radar technology, providing exceptional environmental perception and navigation capabilities for robotic vacuum cleaners.

SLAMTEC Athena 2.0: The Outstanding Evolution of Intelligent Elevator Control Systems
Athena 2.0 is a small, scalable, and cost-effective robotic platform developed by SLAMTEC, designed to meet the development needs of small-scale robot applications. These applications include intelligent inspection robots, cargo transport robots, restaurant delivery robots, and more. It comes equipped with SLAMTEC’s latest upgraded high-performance SLAMCUBE2 autonomous navigation and positioning system, enabling it to perform path planning and location navigation. This capability allows Athena 2.0 to operate in various commercial environments, supporting the integration of different applications.

SLAMTEC Mapper Quick Start Guide
SLAMTEC Mapper operates on the unique SLAM optimization algorithm developed by Slamtec, combined with a high-performance laser radar. It can perform map data fusion over 10 times per second and generate maps for areas up to 100,000 square meters. The laser radar conducts distance measurements at a rate of 9,200 times per second, with a maximum range of 40 meters. Real-time data processing is carried out by the built-in processing system, delivering high-precision mapping and positioning information

SLAMTEC RPLIDAR S2: High-Speed Obstacle Avoidance LiDAR, 30-Meter Omnidirectional Range Scanning
A service robot deployed in office buildings, factories, hotels, hospitals, and similar environments requires autonomous mobility and obstacle avoidance capabilities. To achieve obstacle avoidance in unknown environments, laser radar sensors are commonly employed. These sensors provide accurate environmental information, including obstacle dimensions and positions, enabling the robot to dynamically adjust its path, move safely, and accomplish tasks in real-time.

Deployment and Usage Instructions for SLAMTEC Hermes
Hermes is a medium-sized, scalable, and cost-effective robotic platform developed by SLAMTEC to meet the needs of small and medium-sized robot application development. Applications include intelligent inspection robots, container transport robots, hotel delivery robots, restaurant food delivery robots, and more.

Quick Start Guide for RPLIDAR LPX-T1
LPX-T1 is a new generation long and medium-range high-performance laser radar developed by SLAMTEC. It boasts a ranging capability of up to 40 meters, with a rapid laser ranging sampling rate of up to 60,000 times per second. Additionally, it exhibits strong resistance to ambient light, with a capability of up to 80,000 lux. The scanning angle covers 270 degrees, allowing it to generate real-time planar point cloud map information, providing precise environmental perception and navigation support.

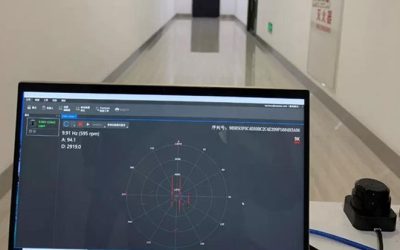
SLAMTEC Mapper Mapping and Localization Radar
SLAMTEC Mapper is a new category of laser sensor introduced by SLAMTEC, distinct from traditional lidar sensors. This product comes equipped with SLAM real-time mapping and localization capabilities, suitable for various applications such as robot navigation, environmental mapping, and handheld measurements.

How to Combine RPLIDAR Series LIDAR with ROS
SLAMTEC RPLIDAR series LIDAR equipment is a powerful environmental perception tool. They support 360° scanning and...

SLAMTEC Athena2.0 Robot Platform: Comprehensive Upgrade in Mapping and Navigation Performance, Bringing More Possibilities to Applications
The Athena2.0 intelligent robot platform has always been loved by users for its excellent performance, reliability,...

SLAMTEC Empowers Delivery Robot: Solving the Last-Mile Delivery Challenge
In today’s rapidly evolving technology era, artificial intelligence is gradually permeating every aspect of our lives,...

Introducing RPLIDAR S3: Smaller Size, Better Performance
Smaller size, better performance The new generation of SL-Dtof flagship product is launched! RPLIDAR S3 Equipped with...
Full Analysis of the Functions of SLAMTEC RPLIDAR S1
RPLIDAR S1 is the first TOF LIDAR launched by SLAMTEC. It combines the characteristics of ultra-long distance...

Intelligent Robot Mobile Platform: Innovative Application Expansion of Slamtec Chassis
As an important part of the robot, the robot chassis carries the important functions of robot movement and navigation....

SLAMTEC X ICRA 2023 RoboMaster College Sim2Real Challenge has come to a perfect conclusion!
In June 2023, the ICRA 2023 RoboMaster Univerisity Sim2Real Challenge (RoboMaster Univerisity Sim2Real Challenge,...

Exploring the ROS Robot World: The Infinite Potential of RPLIDAR
As a robot software platform, ROS can provide operating system-like functions for heterogeneous computer clusters. For...

SLAMTEC HERMES Chassis: Perfect Integration of Intelligent Walking and Multi-Floor Autonomous Elevator Navigation
With the increasing demand for robots in multi-floor operations, autonomous elevator technology has become an...

RPLIDAR S2: Compact Size, Precise Perception
The maturity of LIDAR technology plays a vital role in the practical application of intelligent robots, and SLAMTEC,...

The Difference Between LIDAR and Millimeter Wave Radar
Environmental perception and recognition are inseparable from sensors such as LIDAR and millimeter-wave radar. LIDAR...

The Future of Home Robotics Enabled by SLAMTEC RPLIDARThe Future of Home Robotics Enabled by SLAMTEC RPLIDAR The Future of Home Robotics Enabled by SLAMTEC RPLIDAR
Have you ever fantasized about owning a super-intelligent robotic arm that effortlessly performs household tasks like...