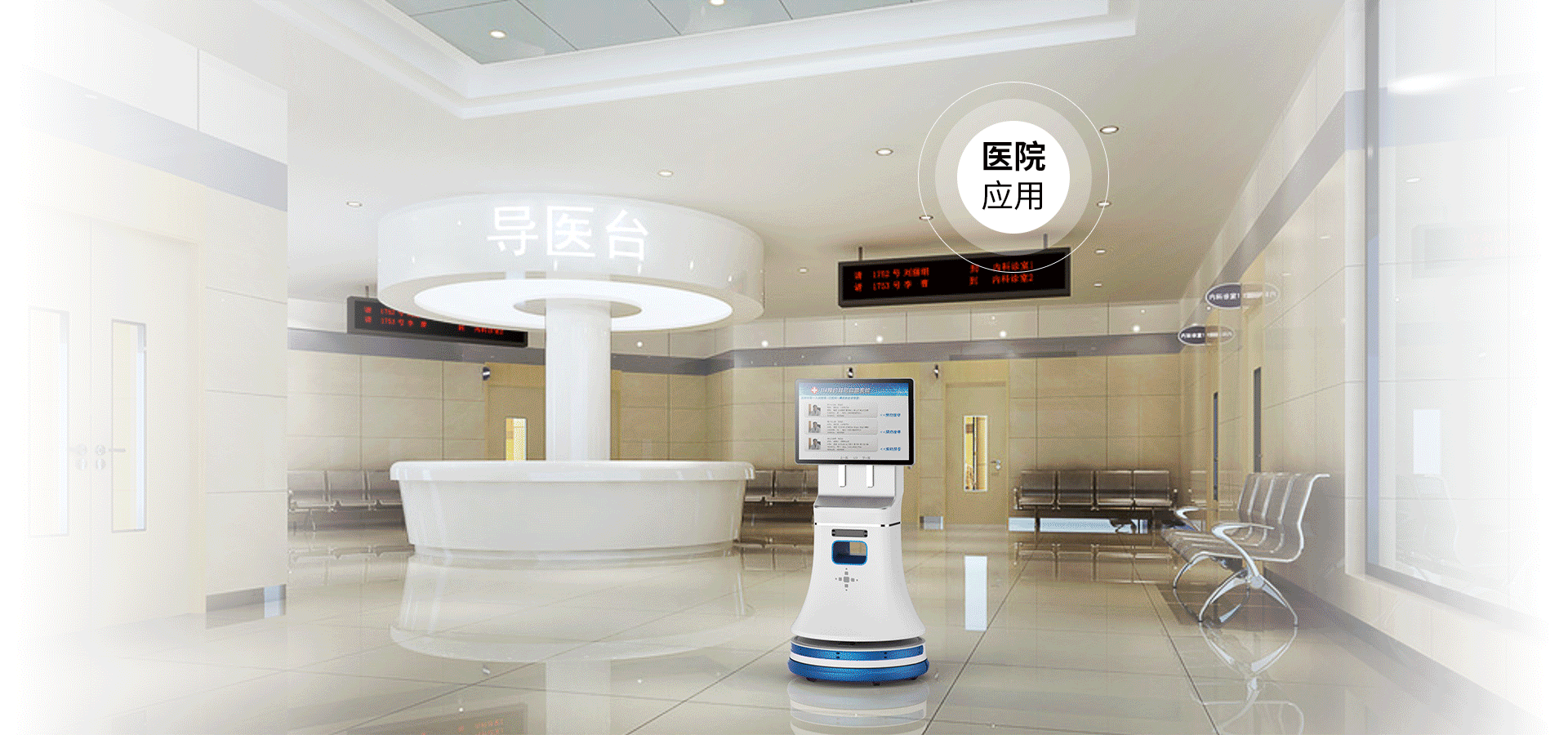
无需人为协助
多路线巡逻模式
寻找路径并移动到指定地点

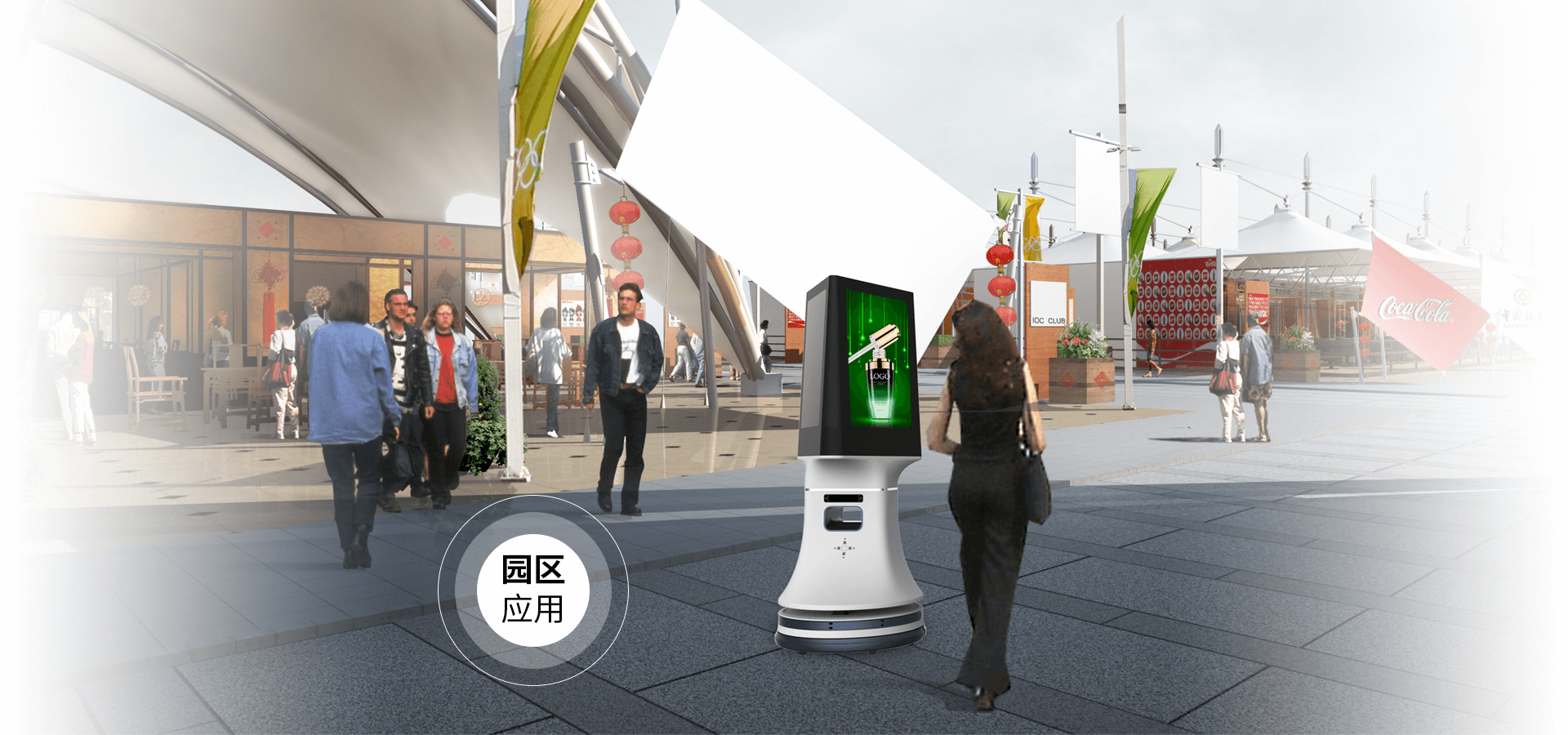
完全开放的软硬件平台
提供外扩硬件支持
通过SLAMWARE SDK进行业务逻辑应用开发

支持可外部调度的预约式充电
自主导航定位,自动返回充电坞充电

基于云服务,远程管理已注册的Zeus平台

无需人为协助
多路线巡逻模式
寻找路径并移动到指定地点
完全开放的软硬件平台
提供外扩硬件支持
通过SLAMWARE SDK进行业务逻辑应用开发
支持可外部调度的预约式充电
自主导航定位,自动返回充电坞充电
基于云服务,远程管理已注册的Zeus平台













思岚科技官方微信