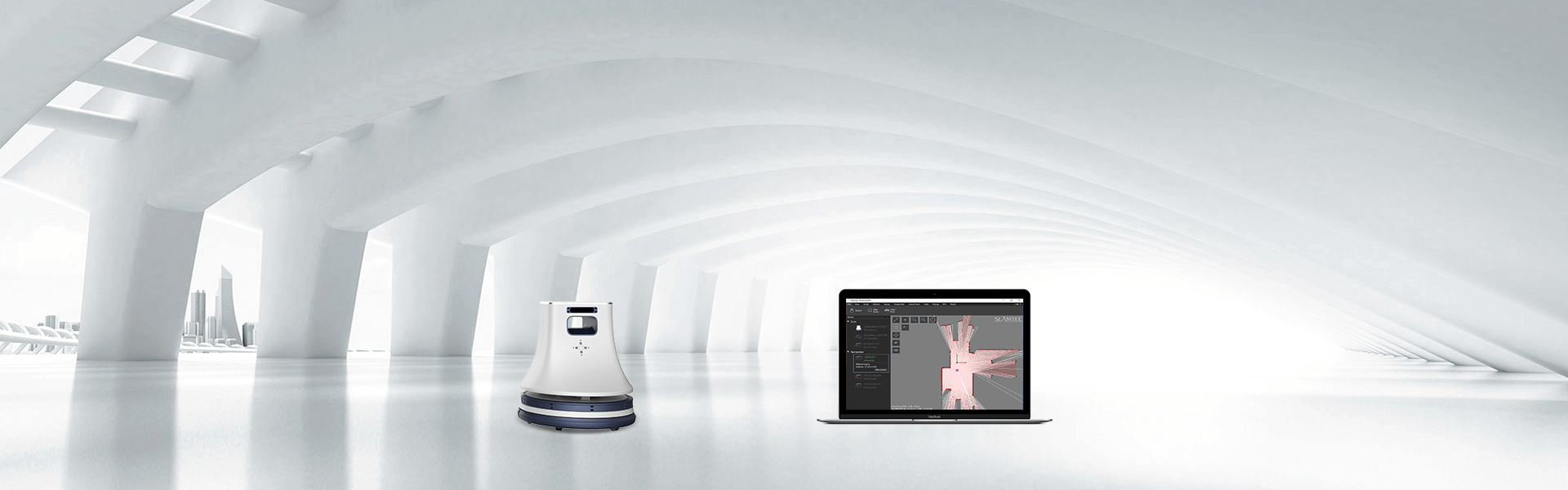

Check sensor, map and pose information in real time via the robot’s interfaces.

Process the collected robot information and present it with a user-friendly interface.

Send corresponding commands to control the robot in real time.

Slamtec Official WeChat



