机器人产品在当前仍属于初阶智能阶段,还在较多地依赖人,但智能技术的快速迭代与进步也是不容忽视的,并且越来越多地进入到机器人一线应用领域。

机器人概念并不是单纯的用来炒作或做噱头博眼球,在机器人真实落地应用的多个行业终端,包括金融、零售、广告、养老、政务以及通信运营商等垂直行业中,思岚科技最新发布的中小型机器人平台Apollo已成为众多产品中的明星焦点。
Apollo自主行走的秘密:

拥有多重传感器的Apollo能有效地避开各种复杂环境中的障碍物并正确实现其路径规划与导航的功能。
雷达传感器
Apollo配备的高性能激光雷达扫描半径大于15M,扫描频率为20HZ。基于该雷达提供的地图数据,Apollo可以构建精度达5cm的地图并基于该地图实现自主路径规划及导航功能。
超声波传感器
Apollo机身总共配置有5枚超声波传感器,分布于前方底部边缘。覆盖区域为正前方160°,40cm以内区域。该传感器主要用于探测高透材质的障碍物以优化Apollo建图及避障性能。
深度摄像头传感器
Apollo机身前方上部配置的深度摄像头传感器可视角度为45°x35°,最大可视距离为1.3m,它使得Apollo可以侦测到位于雷达扫描平面上方的障碍物并及时发送信号进行规避。
防跌落传感器
Apollo正前方底部边缘分布有3枚防跌落传感器,其最小感应深度约为5cm,当Apollo行至台阶边缘时,防跌落传感器将发送信号请求改变机器人前进方向,从而实现防跌落的目的。
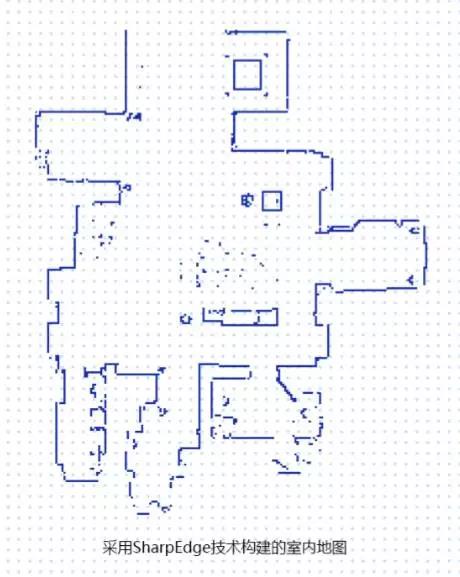
Aopllp配备了SLAMWARE机器人自主定位导航模组,集成了基于激光雷达的SLAM及配套路径规划功能,内置运动控制算法,可以实现未知环境中的即时定位、路径规划,并直接输出高达5CM分辨率的机器人周围环境地图,且不存在误差累计问题。

不仅如此,Apollo还可以自主上下电梯,构建多楼层地图,到达楼层的每一层后,Apollo将自动标记所在楼层,并构建该楼层地图。构建的多楼层地图可用于构建各楼层平面图,购物导航,紧急疏散等,便于终端用户随时随地查看。
虚拟墙及虚拟轨道功能
基于纯软件方式,高效可靠,无需额外辅助铺设,即可限定机器人活动范围和行动路线。同时支持物理磁轨隔断(选配)。
扩展之后的Apollo机器人可以运用到公司接待机器人,商场导购机器人等。自主行走的功能可以帮助机器人针对不同场景下的客户需求,使得机器人更高的效率为用户提供更高价值的服务。
虽然机器人产品在当前仍属于初阶阶段,但Apollo的出现推动了机器人朝智能化更近一步。
关键字:机器人底盘,技术科普


思岚科技官方微信

