基于SLAMWARE的服务型机器人底盘电机里程计说明及代码示例
2018/12/14 03:18:43
基于SLAMWARE的机器人底盘传感器安装指南
2018/12/13 03:03:28
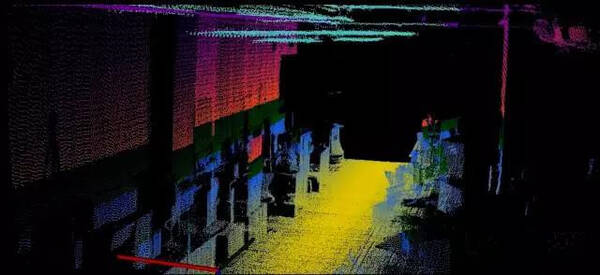
2D激光雷达如何实现3D应用?
2018/12/12 06:37:39
如何使用Robostudio加载地图?
2018/12/10 05:49:21
如何使用思岚robostudio进行地图优化?
2018/12/07 02:31:38
为什么最小转弯半径,决定了人形机器人是否能落地?
双轮差速vs四轮转向vs麦克纳姆轮:哪种更适合人形机器人?
人形机器人移动方式全解析:从系统架构看轮式、双足与混合方案
人形机器人为什么也需要底盘?和双足行走冲突吗?
思岚科技学堂上线|一站式加速机器人开发
RoboStudio常见问题解答
RoboStudio安卓2.0全面升级,全新UI,持续提升操作体验
轻装上阵,思岚科技机器人底盘的百变惊喜
企业家访谈:缔造“中国模式”——智能机器人先驱者的“智造”之路
思岚科技CEO陈士凯:专注机器人自主行走,践行行业发展的每一步