 简单6招,快速构建符合导航需求的地图
简单6招,快速构建符合导航需求的地图

地图作为机器人自主定位、避障、规划路线的依据之一,其重要程度不言而喻。
雷达作为建图的重要工具,在整个自主定位导航过程中充当着“眼睛”的角色,以思岚的RPLIDAR 建图作案例说明。

RPLIDAR A3
1)雷达的安装方法及相关注意事项:
1. 雷达水平安装角度:0度 ~ +2度 (倾角朝上);
2. 雷达扫描开口角度:建议270度及以上,最好在机器人正前方和正后方均有开口, 至少需要大于220度;
3. 雷达盲区:15cm, 建议雷达在安装时,可以略往底盘结构中心靠近,以减少盲区;
2)雷达安装是否水平对slamware解决方案的建图及定位有重要影响:
1. 影响测距精度,进而影响建图精度和定位精度;
2. 如若雷达扫描平面水平向下倾斜,激光点会扫描到地面,这种情况下建图则会导致障碍物错乱,定位则会导致定位漂移;
3)雷达安装完毕后,紧接着就是建图之前的准备工作,主要如下:
1. 尽量在待扫区域里没人或者人较少的时间点进行扫图;
2. 尽量清除待扫区域中经常移动的物体(如经常移动的人群、搬动的桌子、盆饰等等);
3.对于场景中的反光,透光,吸光等物体(如:镜子、玻璃等),在条件允许的情况下,尽量在机器人的雷达扫描平面处贴上其他不影响雷达正常扫描的材料;
4)建图时的技巧:
1. 开机建图时,机器人最好面朝一堵直墙,且让雷达尽可能多的扫到更多的有效点;
2.在商场或者一些大环境应用场景下建图时,最好让机器人先去完成建图闭环,再去详细扫描环境里的各个小细节;

3.擦除未探明的区域
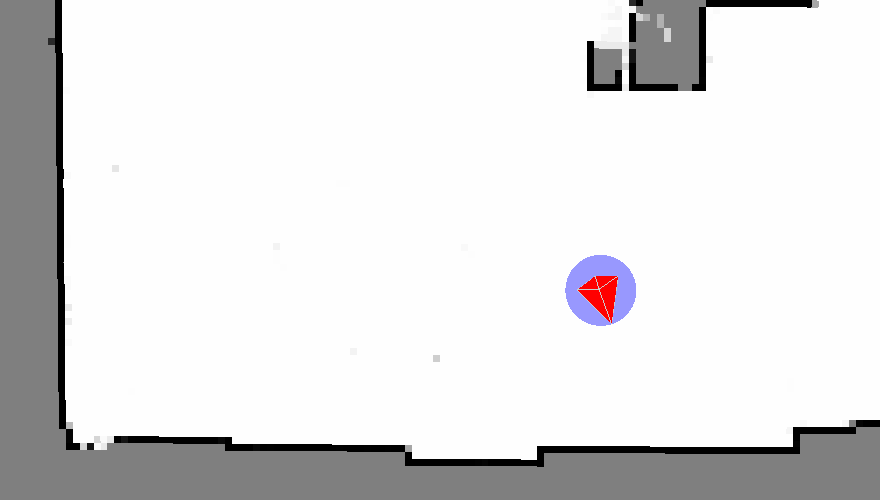
在机器人的行走区域内,可能会出现一些扫图时未完全探明的区域(主要跟雷达测距半径有关),在Robo Studio操作软件中,此处区域显示为灰色(如下图红圈处所示),如果在此范围内,确实不存在任何障碍物,可用白色橡皮擦将此灰色区域擦除,成为已探明区域;

下图为RoboStudio的工具栏,红圈处为白色橡皮擦:

4.除了可用白色橡皮擦擦除构建区域中的未探明区域之外,还可擦除地图区域中不断移动的物体(如:移动的人群,后期会随时搬移的障碍物等);

5.尽量保证地图的完整性,在机器可能的行走路径上,所有周围360度的区域,均需要用雷达探明,目的是增加地图的完整性,使得激光匹配的参照点更多;

6.如果地图已经建好,尽量不要在已建好的地图区域反复来回行走,请尽快保存地图。点击Robo Studio上面的sync map按钮,同步地图后保存地图;

如何判断扫好的地图符合定位导航的要求:
1.地图中障碍物边缘是否清晰;

2.地图中是否存和实际环境不一致的区域(如:有无闭环)。
3.地图中是否存在机器人行动区域内的灰色区域(如:未扫描到的区域)。
4.地图中是否存在后续定位时将不存在的障碍物(如:移动障碍物)。
5.地图中是否能保证机器人在活动区域内的任何位置,360度的视野范围内,均已经探明。
关键字:激光雷达,SLAM

Slamtec Official WeChat






