

Free to use
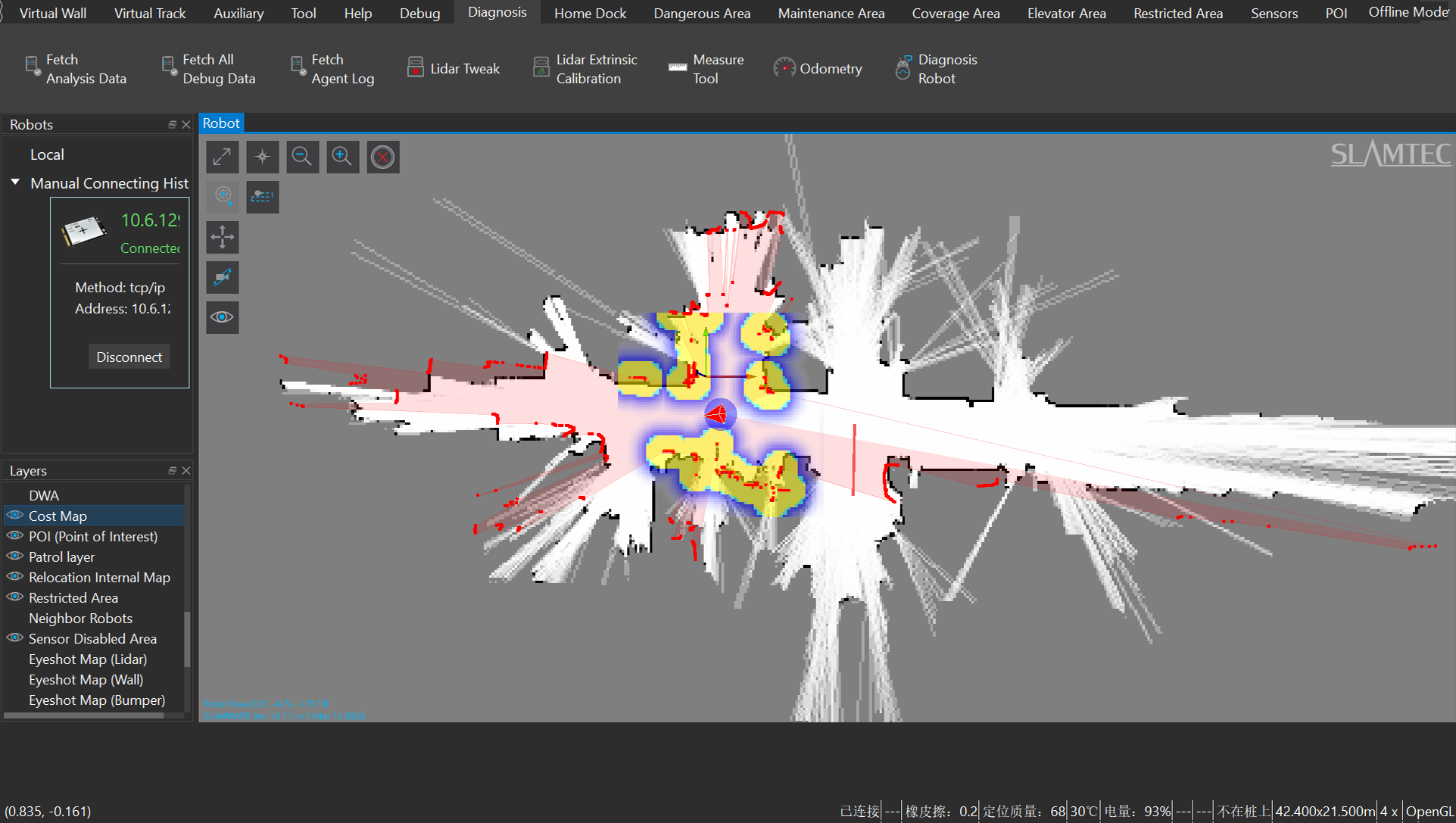
RoboStudio communicates with robots and obtains sensor data, location status, map information and other data from the interface provided by robots. After reprocessing the data information, it is presented to users through a user-friendly interface. Developers can also send commands to robots through RoboStudio to control the robots remotely.
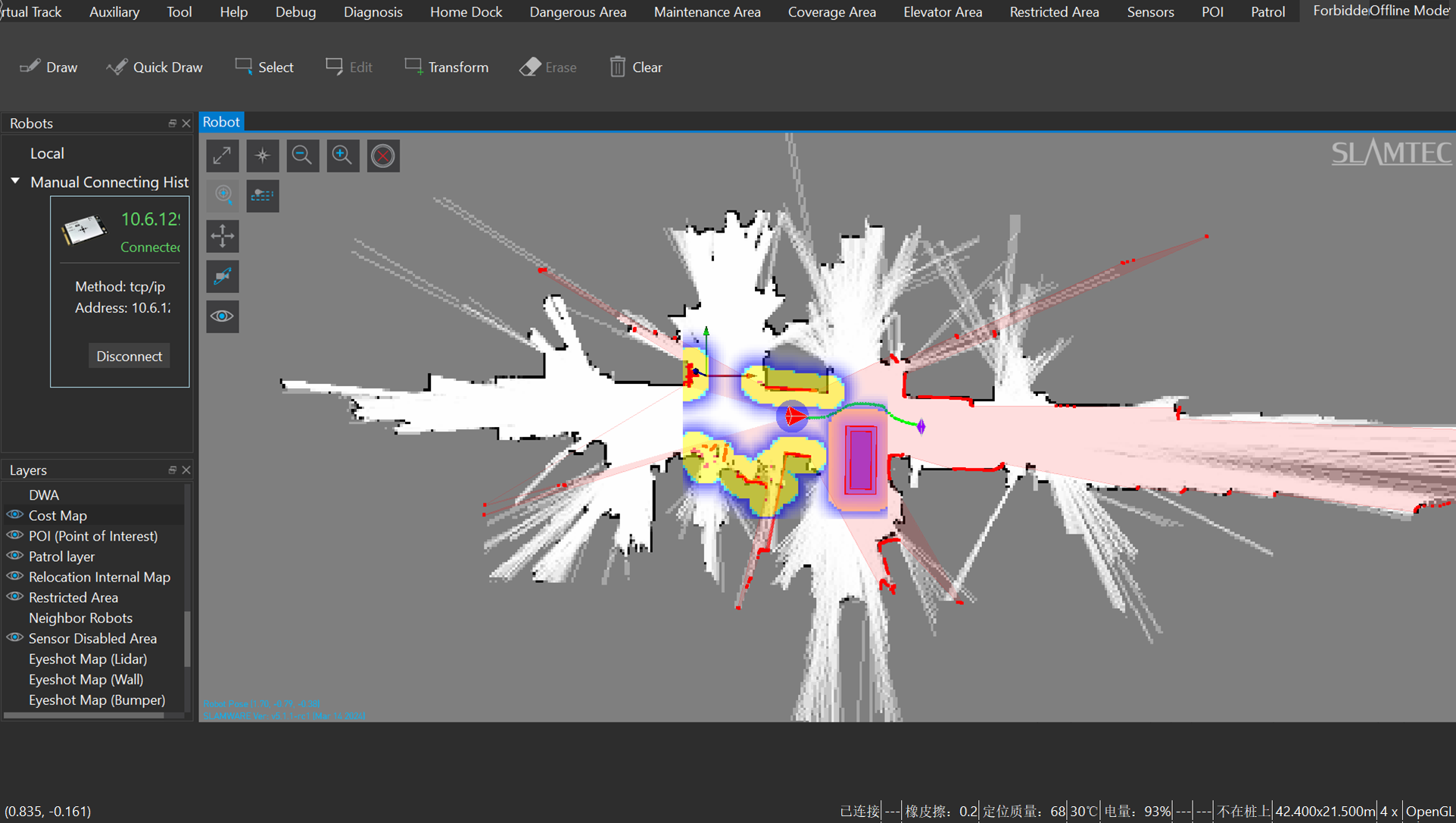
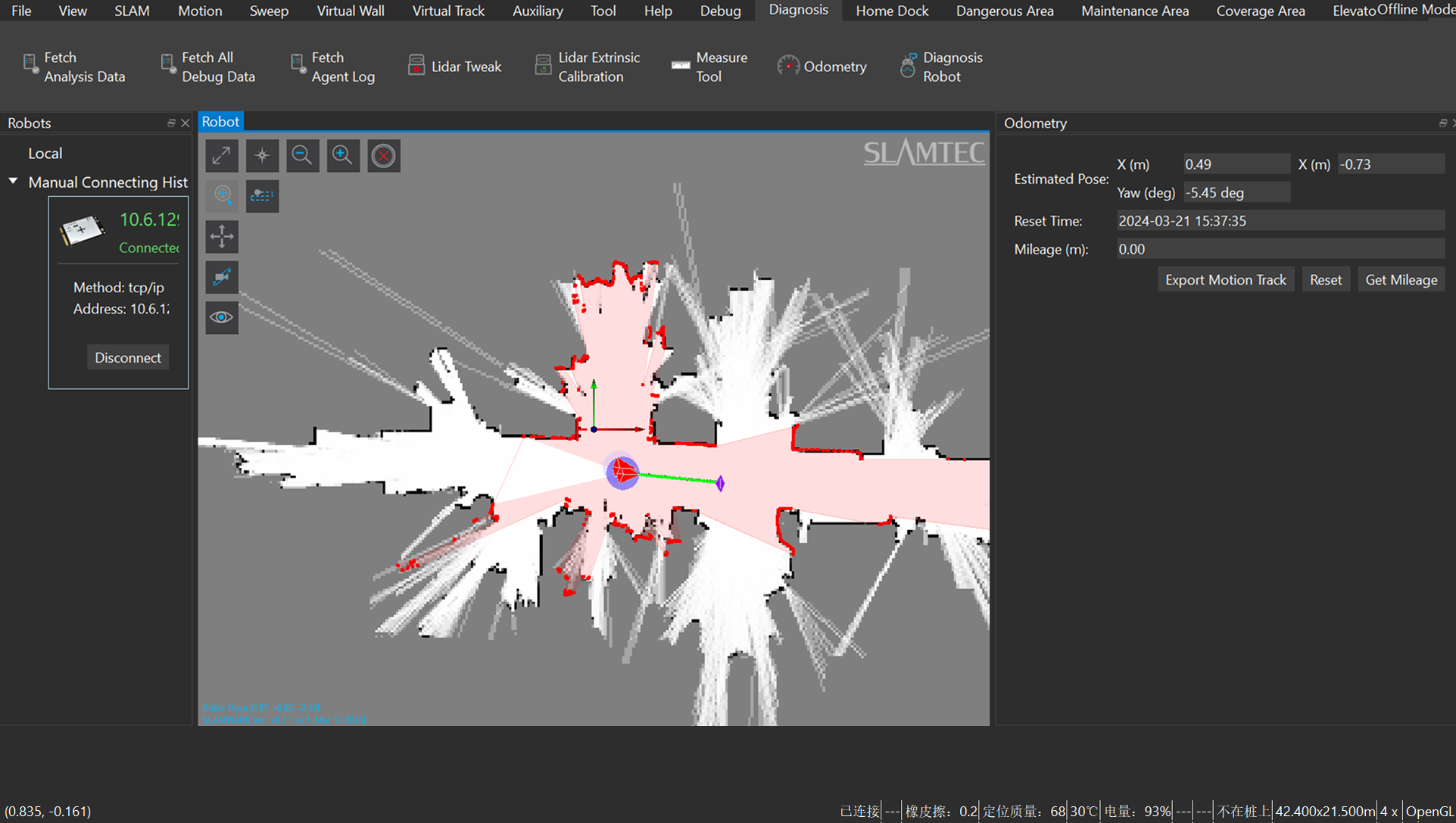
With online/offline map construction, editing, synchronization, stitching, and other management functions, robots have a better understanding and planning ability of map data, providing continuous environmental awareness for the robots.


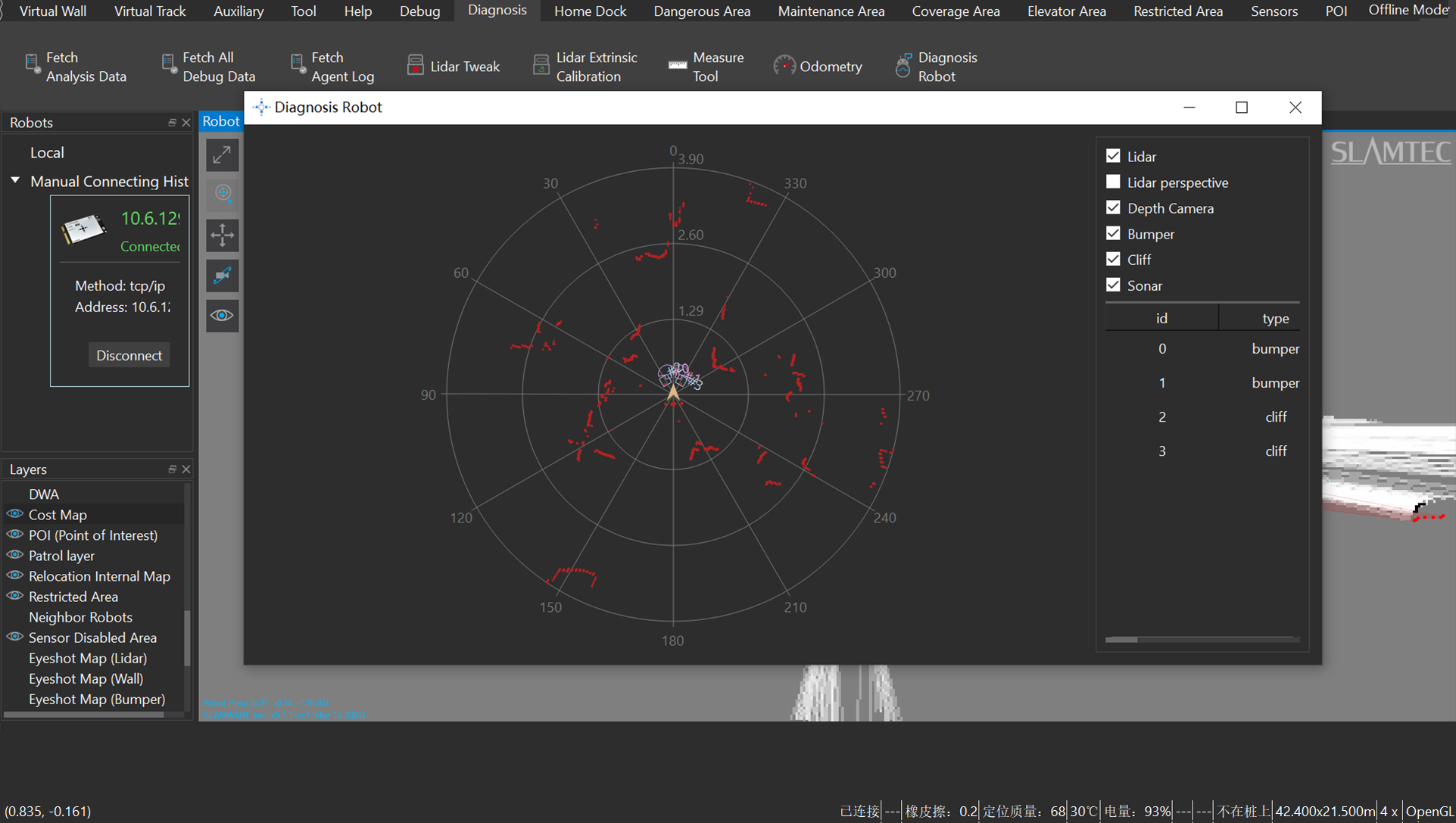
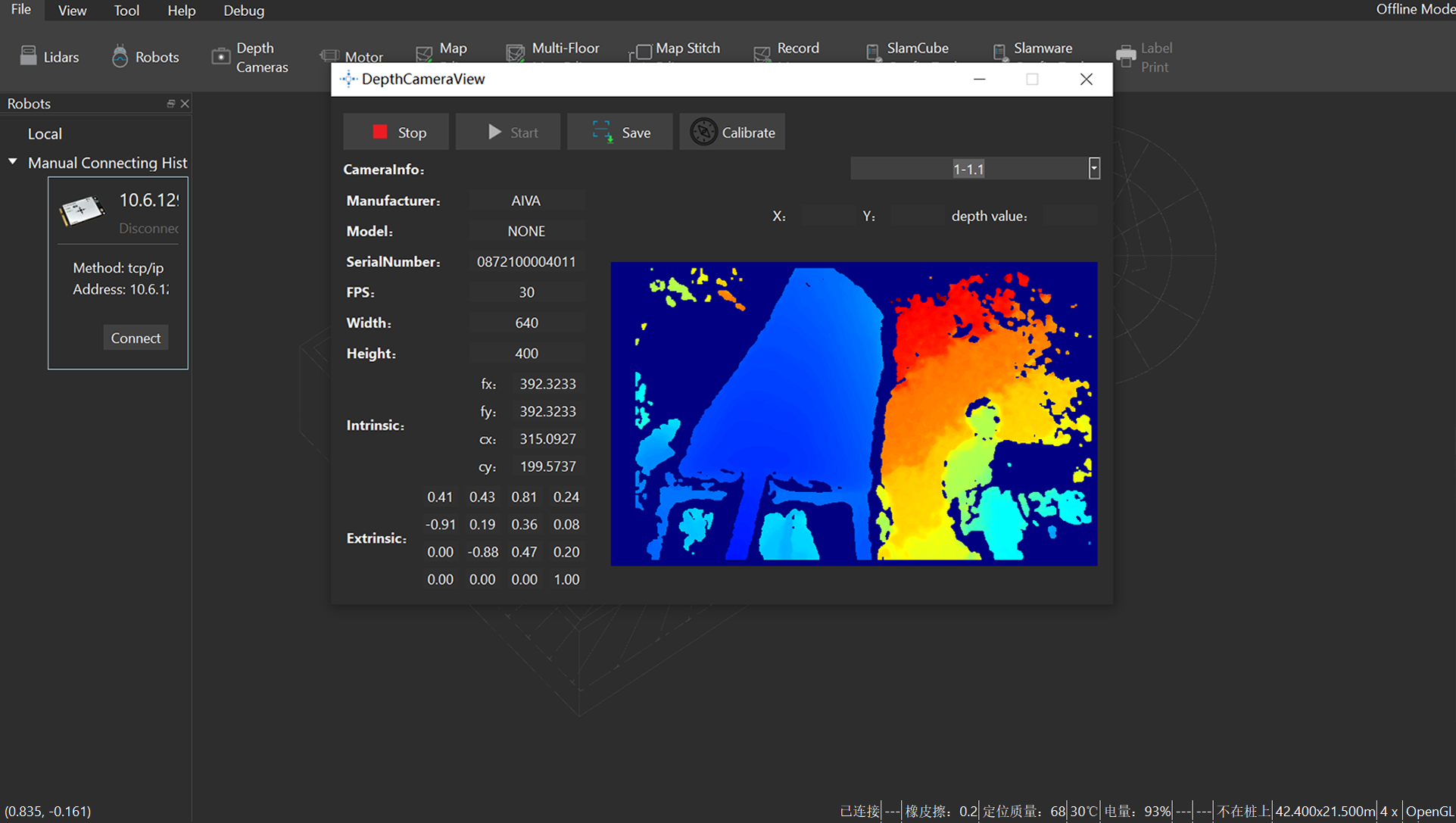
Sensor data, maps, positions, and other information can be obtained in real-time through the interface of robots. When there is a position deviation, the error can be corrected instantly to ensure the efficiency of movement.

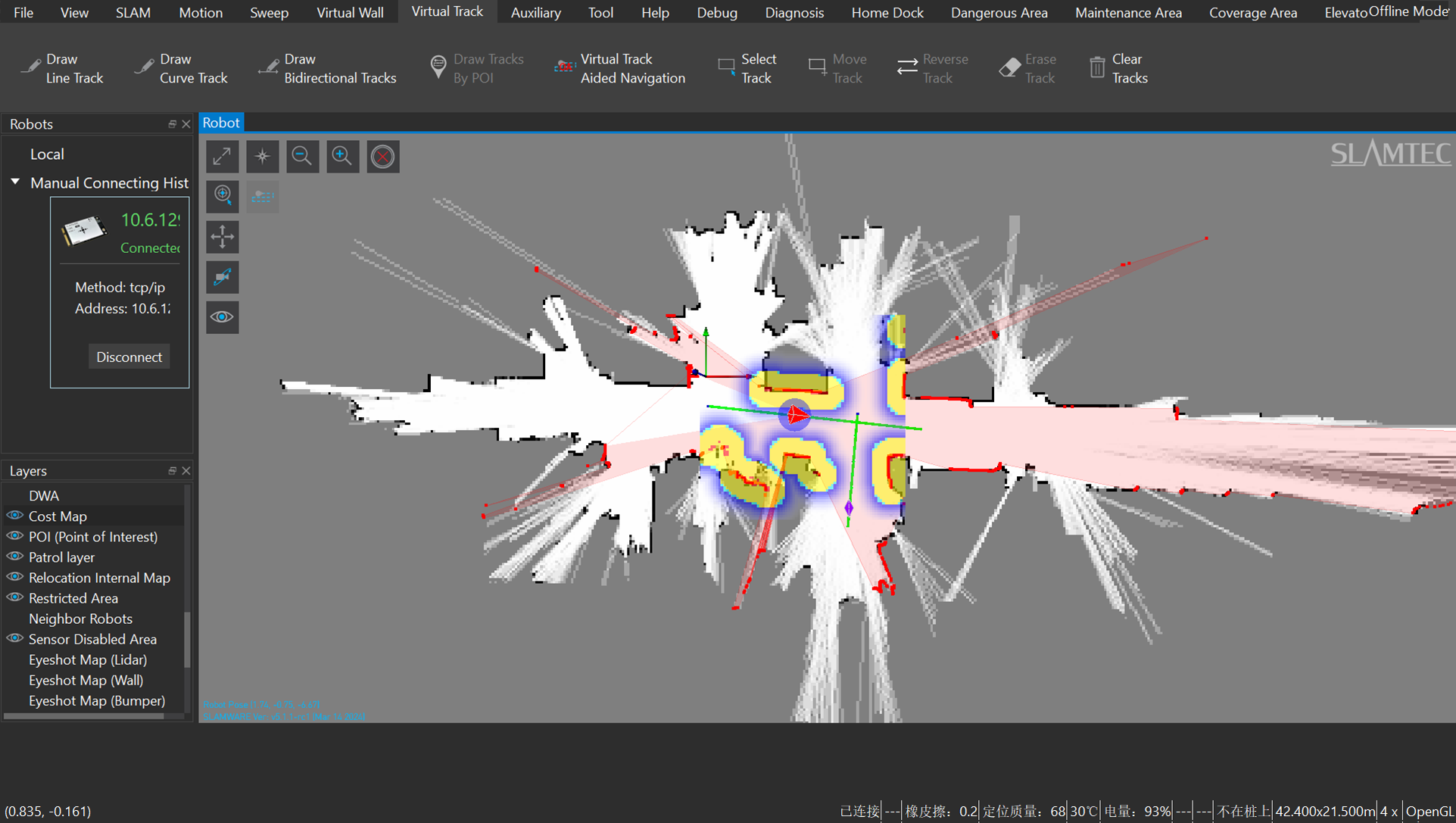
RoboStudio provides extensive software tools, such as virtual wall, virtual track, POI, semantic map area, etc. Without much assistance, it can easily provide the management of limited traffic, speed limit area, environmental labelling (elevator, slope, etc.), navigation path management, and other services for the robots.

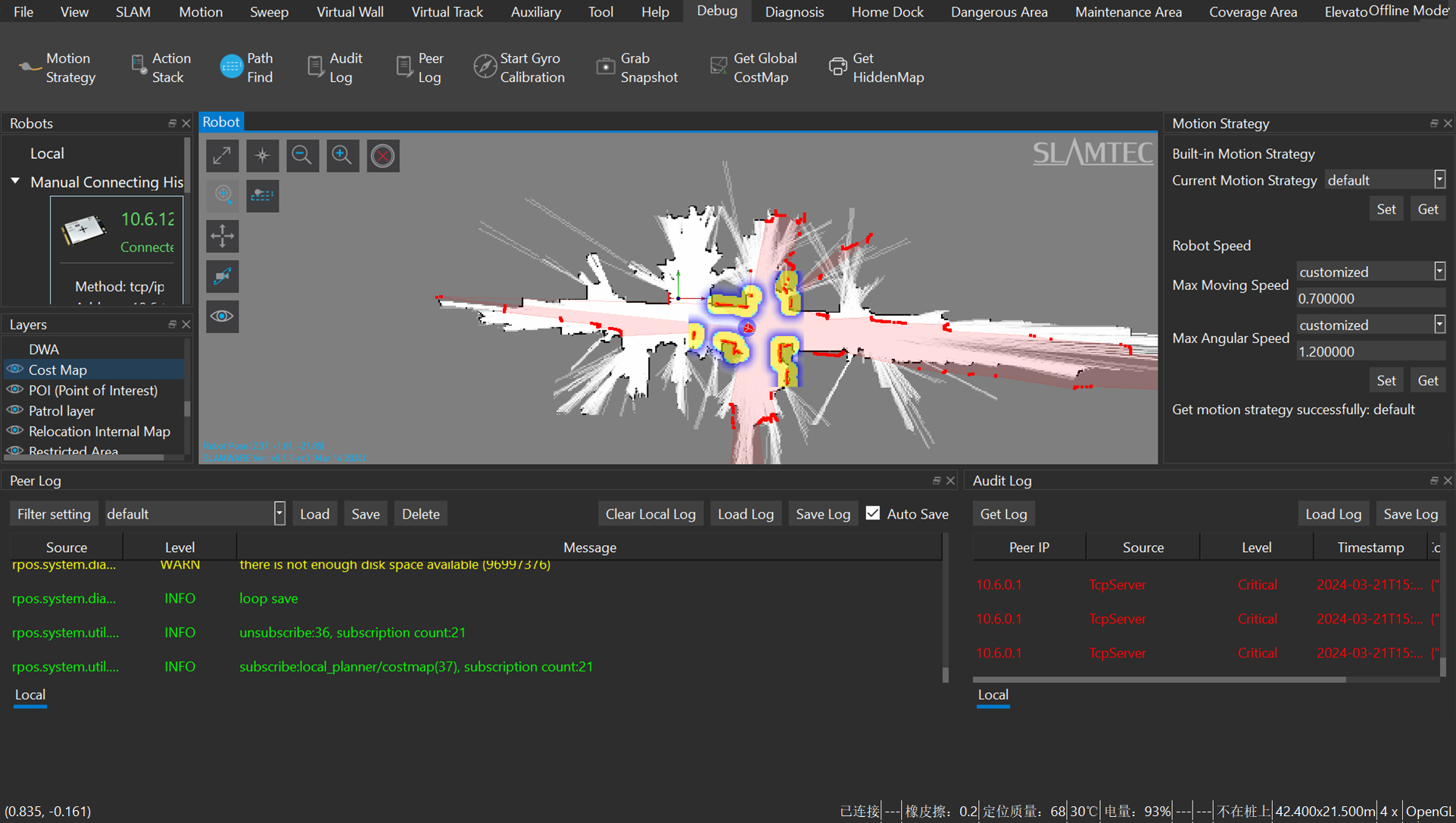
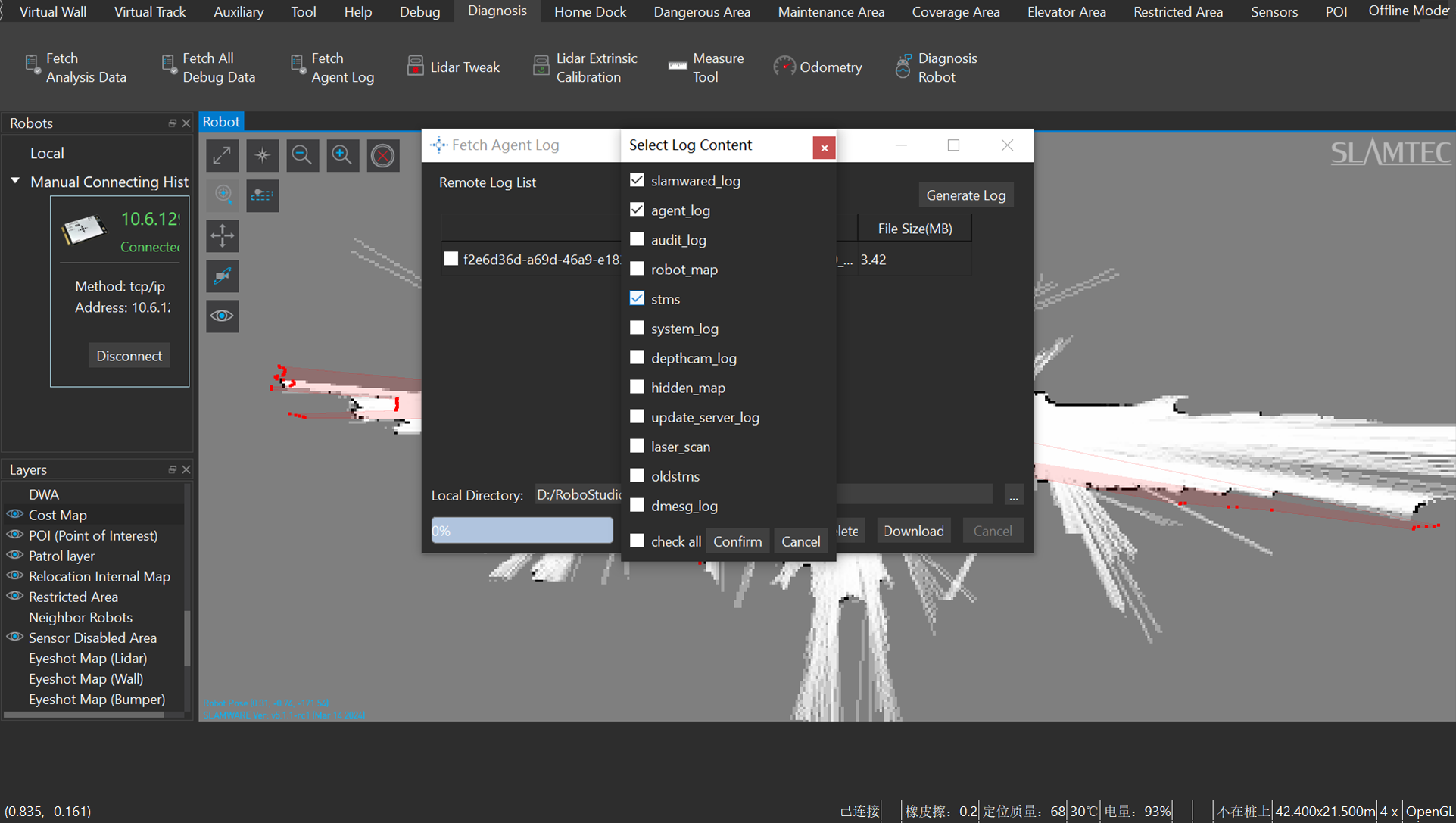
Supports flexible modification of motion parameter settings according to different application scenarios. It also provides a powerful log download feature, allowing you to analyze and debug data during robot movement easily.

User-friendly interfaces
Powerful functions supported

Switch freely among several points of view
Add or remove observing item in displaying result

Rich plugins to meet the requirements in different application scenarios Open-source plugin interfaces provided for users to develop their own plugins

Support all robots with built-in SLAMWARE solution Fully compatible with all SLAMWARE SDK interfaces


Slamtec Official WeChat



