The SLAMWARE uses the autonomous docking and recharging algorithm based on the infrared beacon and laser feature recongnition technology. It makes
the robot go back to to the charge station and start recharging automatically. The robot will know its own “home”, and would not get lost anymore.

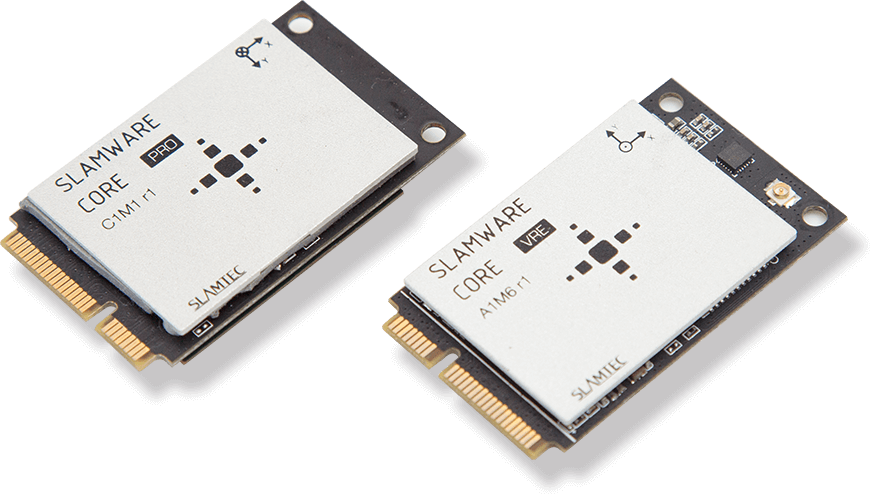
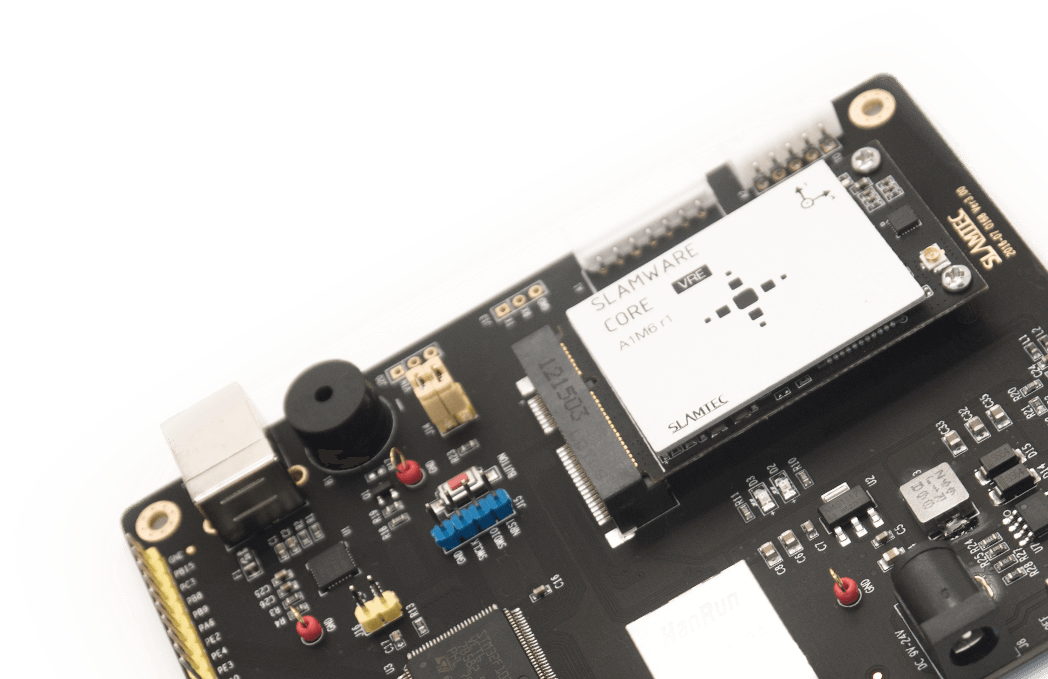
SLAMWARE is a modular robot localization and navigation system.
It has integrated the simultaneous localization and mapping(SLAM)
feature of RPLIDAR with the matched path finding feature.
The host system can develop different new features based on the
communication interfaces of SLAMWARE , the real time robot
loclaization with high-resolution from SDK
and the environmental map data generated in SLAMWARE
SLAMWARE is a modular robot localization and navigation system.It has integrated the simultaneous localization and mapping(SLAM) feature of RPLIDAR with the matched path finding feature.The host system can develop different new features based on the communication interfaces of SLAMWARE , the real time robot loclaization with high-resolution from SDK and the environmental map data generated in SLAMWARE.
With SLAM technology, real time localization will be provided directly after the system launching and there is no need to get the whole map first.
With D* dynamic real time path finding algorithm, the system will automatically find the shortest path to the destination and control the behaviour of the host system.
The system provides the environmental map with resolution up to 5 centimeter and without error accumulating
The system needs only minimum 5V power supply and RPLIDAR connection to function well.

RPLIDAR with<br>high-resolution

Leading real time localization
and mapping technology

Autonomous map building<br>with resolution up to 5cm

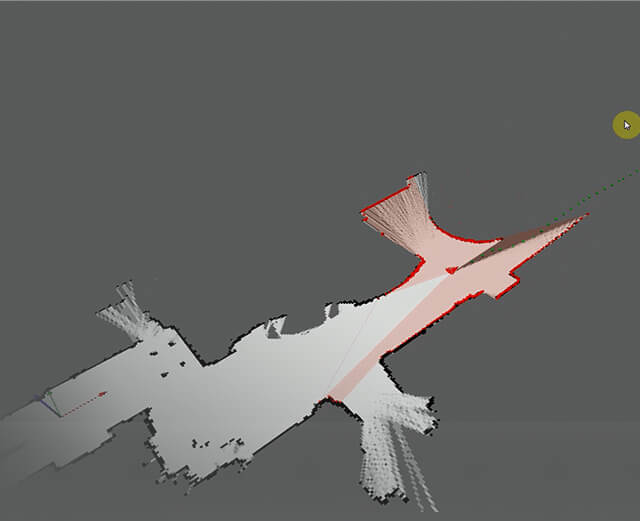
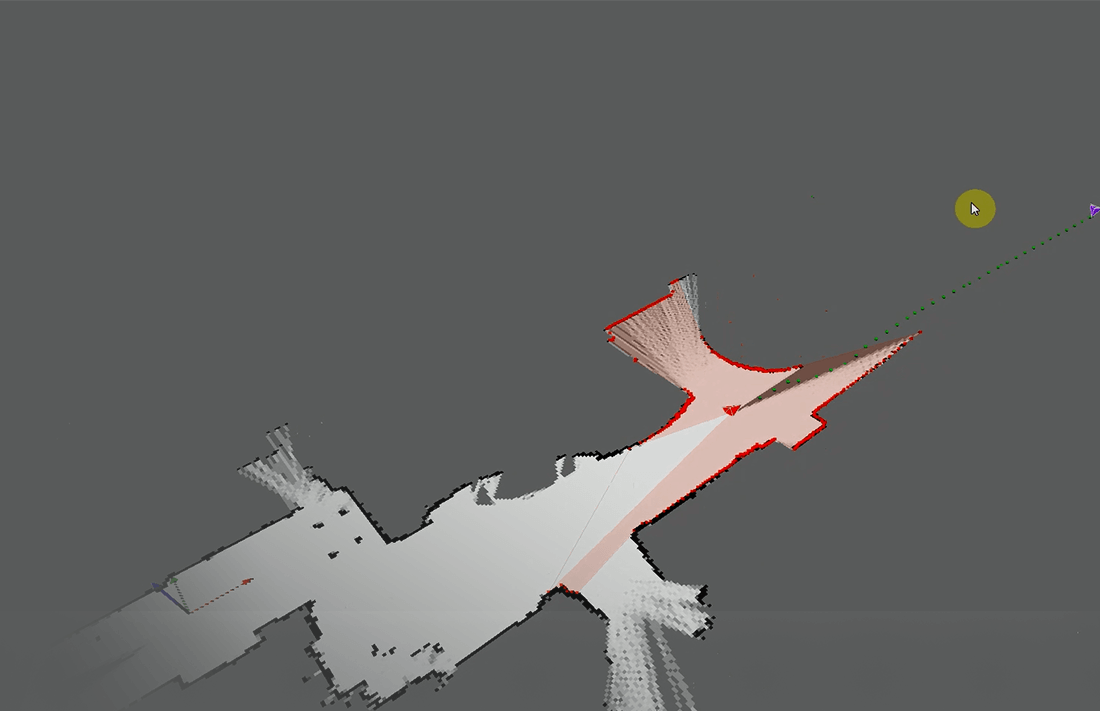
With build in SLAM algorithm , SLAMWARE system can provide real time localization in an unknown environment and automatically build the map of the environment with resolution up to 5 centimeters.
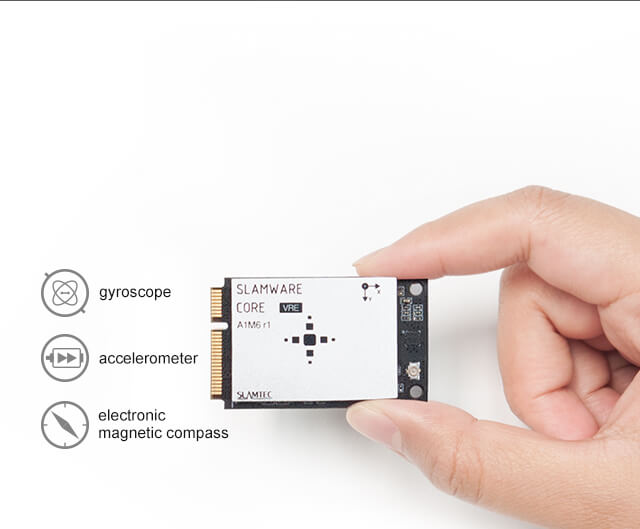

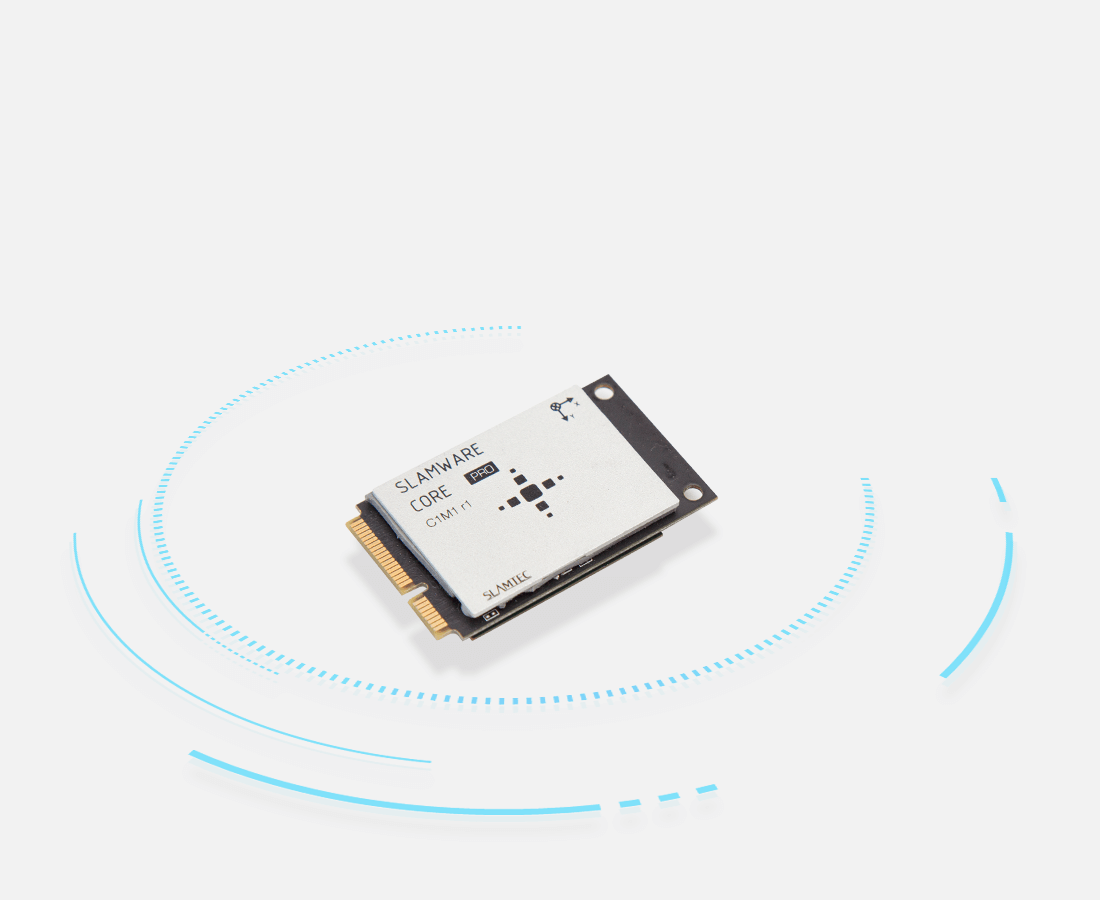
SLAMWARE has integrated IMU 9DOF(gyroscope, accelerometer, magnetic compass) in its module.
Every SLAMWARE module is calibrated to meet our standard before delivery.
Therefore, there is no need for users to buy this kind of sensors and integrate it with the system.
 Gyroscope
Gyroscope
 Accelerometer
Accelerometer
 Compass
Compass
SLAMWARE has integrated IMU 9DOF(gyroscope, accelerometer, magnetic compass) in its module.Every SLAMWARE module is calibrated to meet our standard before delivery.Therefore, there is no need for users to buy this kind of sensors and integrate it with the system.
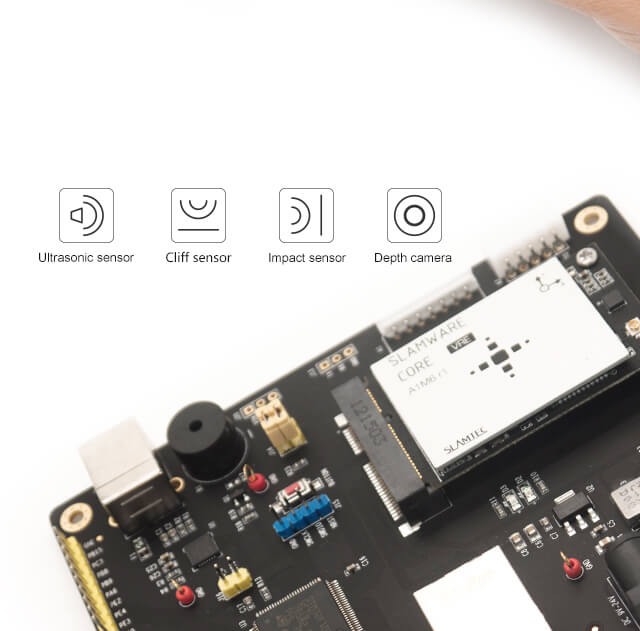
SLAMWARE supports ultrasonic sensor, cliff sensor, impact sensor, depth camera and fuses their data together,which help robot to avoid environmental obstacles more practically and intelligently.
SLAMWARE supports ultrasonic sensor, cliff sensor, impact sensor, depth camera and fuses their data together,
which help robot to avoid environmental obstacles more practically and intelligently

Ultrasonic sensor

Cliff sensor

Impact sensor

Depth camera
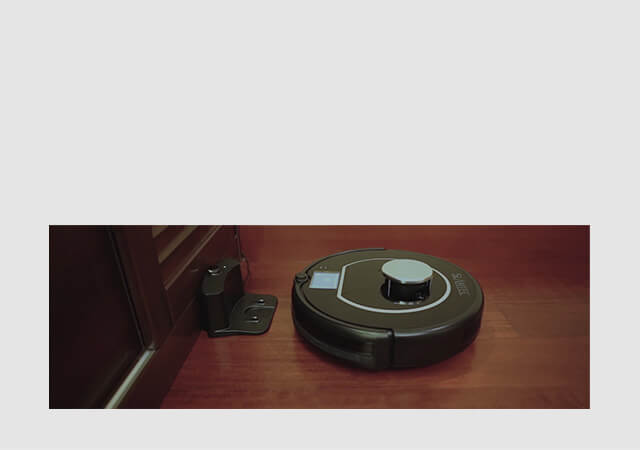
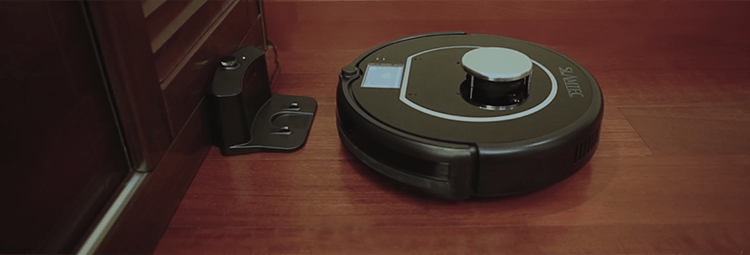
The SLAMWARE uses the autonomous docking and recharging algorithm based on the infrared beacon and laser feature recongnition technology. It makes the robot go back to to the charge station and start recharging automatically. The robot will know its own “home”, and would not get lost anymore.
The SLAMWARE uses the autonomous docking and recharging algorithm based on the infrared beacon and laser feature recongnition technology. It makes
the robot go back to to the charge station and start recharging automatically. The robot will know its own “home”, and would not get lost anymore.

The SLAMWARE has a 802.11b/g/n Wi-Fi network card and will work under AP and Station network mode.Users can connect it with Internet, mobile phones and tablet PC. It also supports SmartConfig for an easy and user-friendly Wi-Fi router connection and configuration.
The SLAMWARE has a 802.11b/g/n Wi-Fi network card and will work under AP and Station network mode.
Users can connect it with Internet, mobile phones and tablet PC. It also supports SmartConfig for an easy
and user-friendly Wi-Fi router connection and configuration.

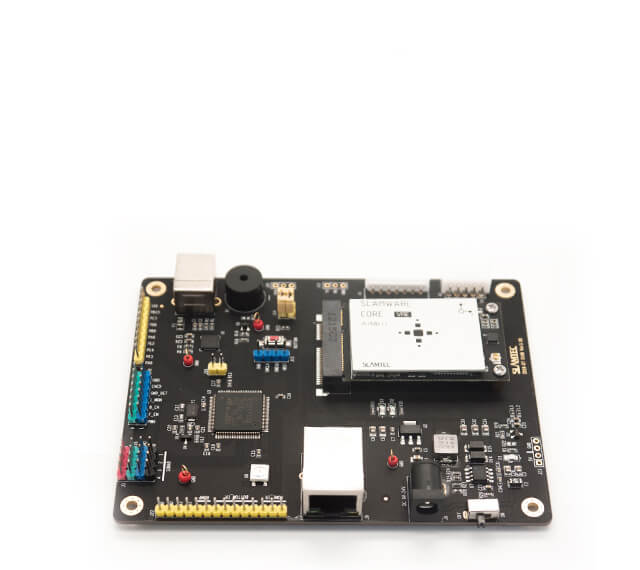
SLAMTEC robot localization and navigation development kit(commercial version) has the high-performance RPLIDAR A2 and the SLAMWARE autonomous robot localization and navigation core module. With this RPLIDAR and core, robot can effectively solve its problem in freely walking and realize the features like autonomous localization, mapping, path finding and obstacles avoiding