 基于SLAMWARE的激光和红外回充方案参考设计
基于SLAMWARE的激光和红外回充方案参考设计
2018/12/17 10:36:31
本文主要基于SLAMWARE的激光回充和红外回充设计进行介绍,在设计机器人回充方案时,可参考此文提供的设计要求。
基于SLAMWARE的服务型机器人底盘电机里程计说明及代码示例
2018/12/14 03:18:43
对于需要自主定位导航的服务型机器人而言,电机里程计的精准度影响着整个机器人的定位精度,电机部分的控制是实现机器人底盘中最为主要的部分。为了便于操作,本文将为大家介绍常见机器人底盘的电机及其编码器并结合Breakout 3.0中STM32的参考代码,对SLAMWARE系统中用到的里程计进行详细说明。
基于SLAMWARE的机器人底盘传感器安装指南
2018/12/13 03:03:28
机器人底盘中传感器安装不当,对机器人定位、建图及避障等会产生重要影响,基于slamware解决方案的机器人底盘常用传感器应该如何安装呢?以及安装中有什么需要注意的呢?本文将为大家一一阐述!
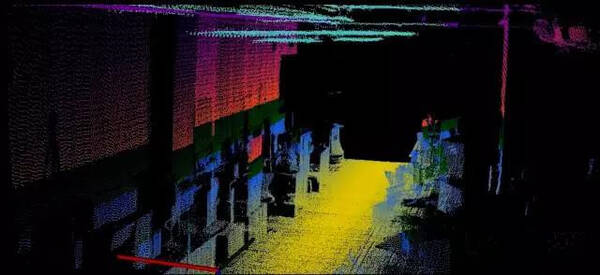
2D激光雷达如何实现3D应用?
2018/12/12 06:37:39
2D激光雷达除了实现定位、建图、多点触摸等应用外,还能用来做3D建模与环境扫描。肯定会有人好奇,2D激光雷达扫描出来的图像应该是平面图,怎么将2D平面图变为三维的立体图呢?
如何使用Robostudio加载地图?
2018/12/10 05:49:21
本文解释了关于加载地图的操作步骤,以及整个流程中需要注意的事项,比如,重定位是加载地图必不可少的一步,经常会被用户忽略。建议操作过程中,按照以下步骤进行。

Slamtec Official WeChat







