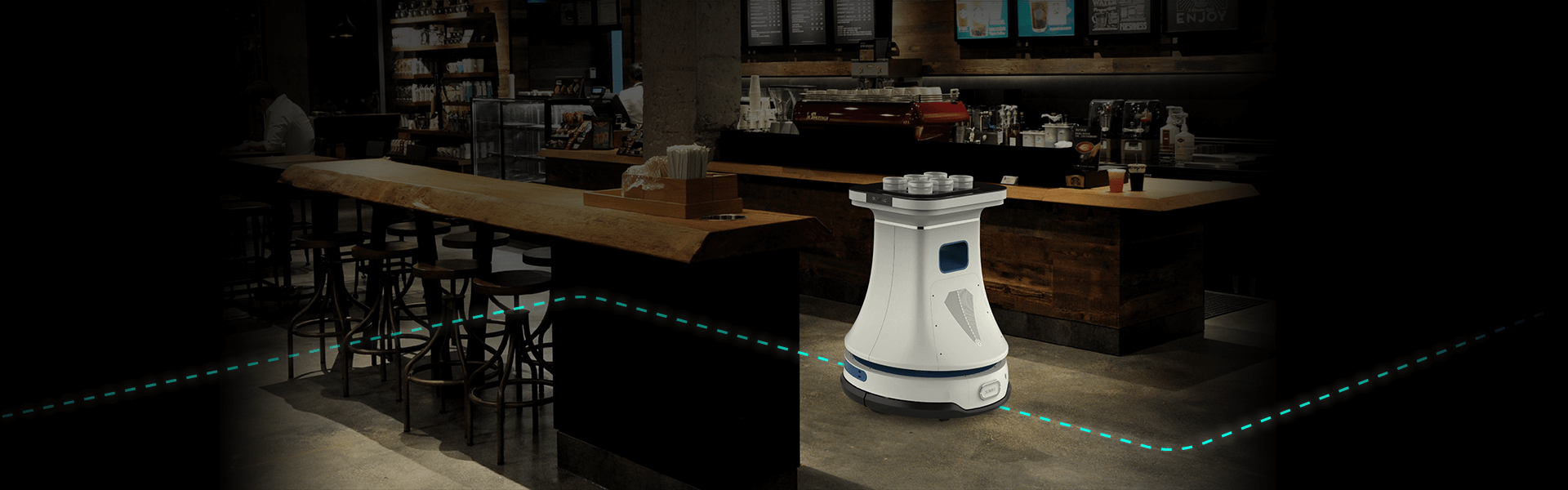

The virtual track is based on pure software and does not require additional accessory devices like beacons or roadblocks. And there is no need to make any changes in the actual application scenarios. The robot can realize intelligent patrolling and monitoring along a regular route.

With virtual track technology, users can switch among different tracks, move the tracks to a different place or edit the tracks according to the specific requirements in actual application scenarios. Therefore, it avoids errors due to signals or errors accumulated in the manually paved tracks. It costs less but provides a high-resolution map.
During path finding process with virtual track navigation enabled, the robot will automatically search for the nearest key point from the robot start point on the designed virtual track, and calculate the shortest track path to the target, and then navigate to the target autonomously, smoothly and avoid obstacles in the way.

Slamtec Official WeChat



