机器人目前在家用、商用、专用及一些工业领域得到了广泛的应用。但是在实际部署使用的过程中,会遇到一些特殊情况,使得机器人会出现导航效果不好或建图效果不佳的问题。
今天,就以一些常见的案例场景为例,给出相应的解决方案供大家参考使用。
· 玻璃镜面反射,表面抛光、光滑的墙面…
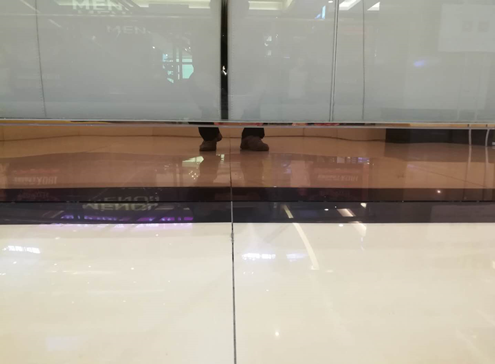

在遇到上述玻璃镜面、光滑墙面等情况时,可着重做以下几个处理:
1) 直接对镜面反射的材料做磨砂处理,可显著改善雷达响应,提高可测量距离;
2) 在材料表面直接粘贴标准的高反哑光胶带,可显著改善雷达测不到的问题;

3) 在材料表面贴磨砂膜(此解决方案仅在雷达较近的范围内有效,大约3m);

4) 利用广告喷绘胶带提升测距极限值;


· 无明显特征的长走廊
酒店长廊、商场长廊,办公室长廊都是日常生活中常见的场景,这些长廊没有明显的特征,会造成机器人在长走廊上运动的时候,出现建图和定位错误。

在遇到上述无明显特征的长走廊时:
1)在长廊中摆放一些绿植,可以有效改善定位建图出现偏差的情况。但是这里,花盆的表面最好为哑光高反表面。

2) 将走廊侧壁特征化
对于走廊侧壁可探测的(满足雷达探测要求),可以采用黑色饰面每隔3~4m划一个30cm左右的不可探测区。
对于走廊侧壁本身不可探测的,可以采用上述“镜面反射表面或玻璃”中描述的方法来转换成可探测表面,再每隔3~4m保留一段大约30cm的不可探测区。
上述这些区域不需要非常规则,可以视实施场地情况做一定的调整,只要保证每过一段区域都有特征即可。
关键字:SLAM,使用指南


思岚科技官方微信

