免费下载使用
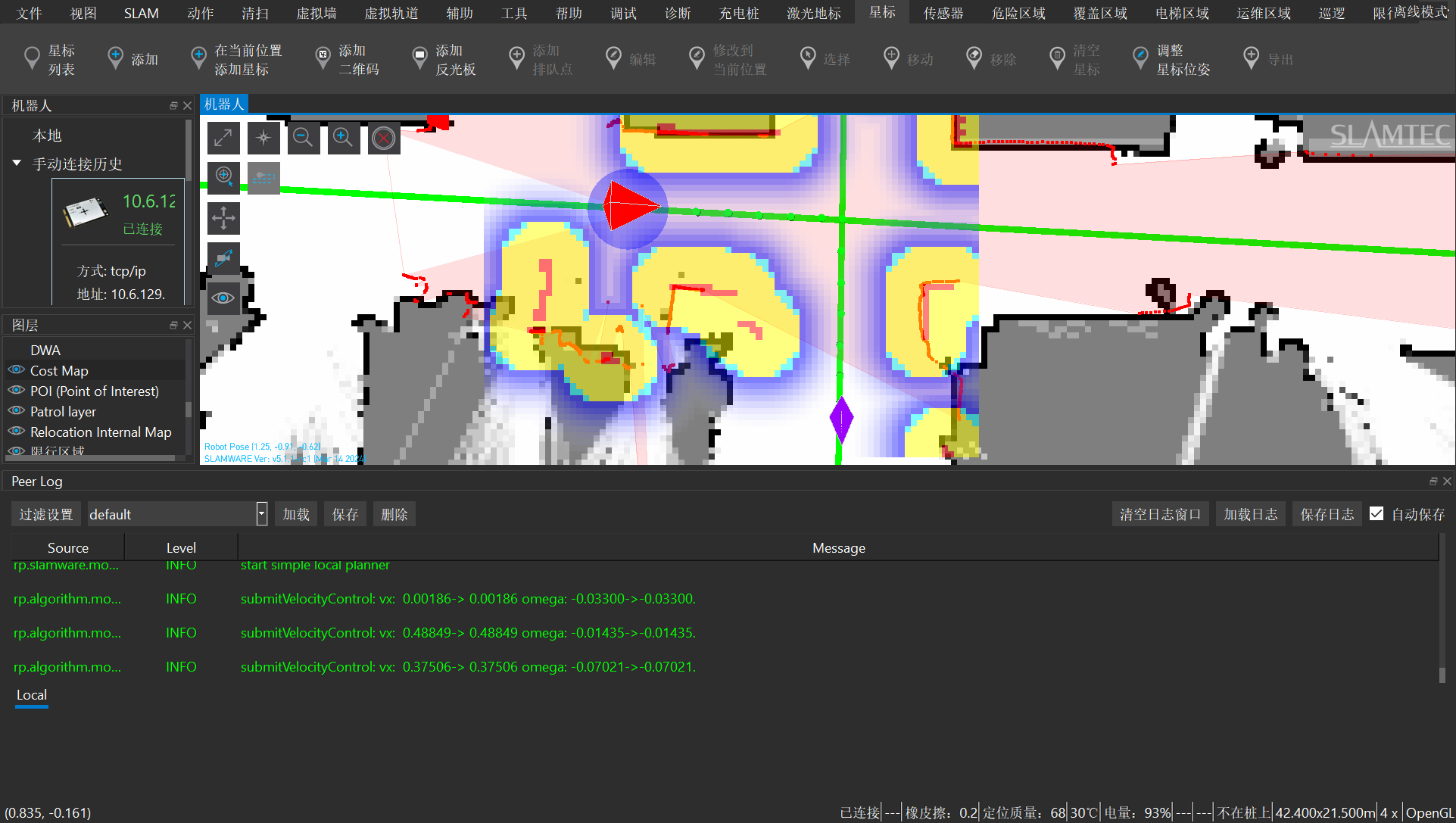
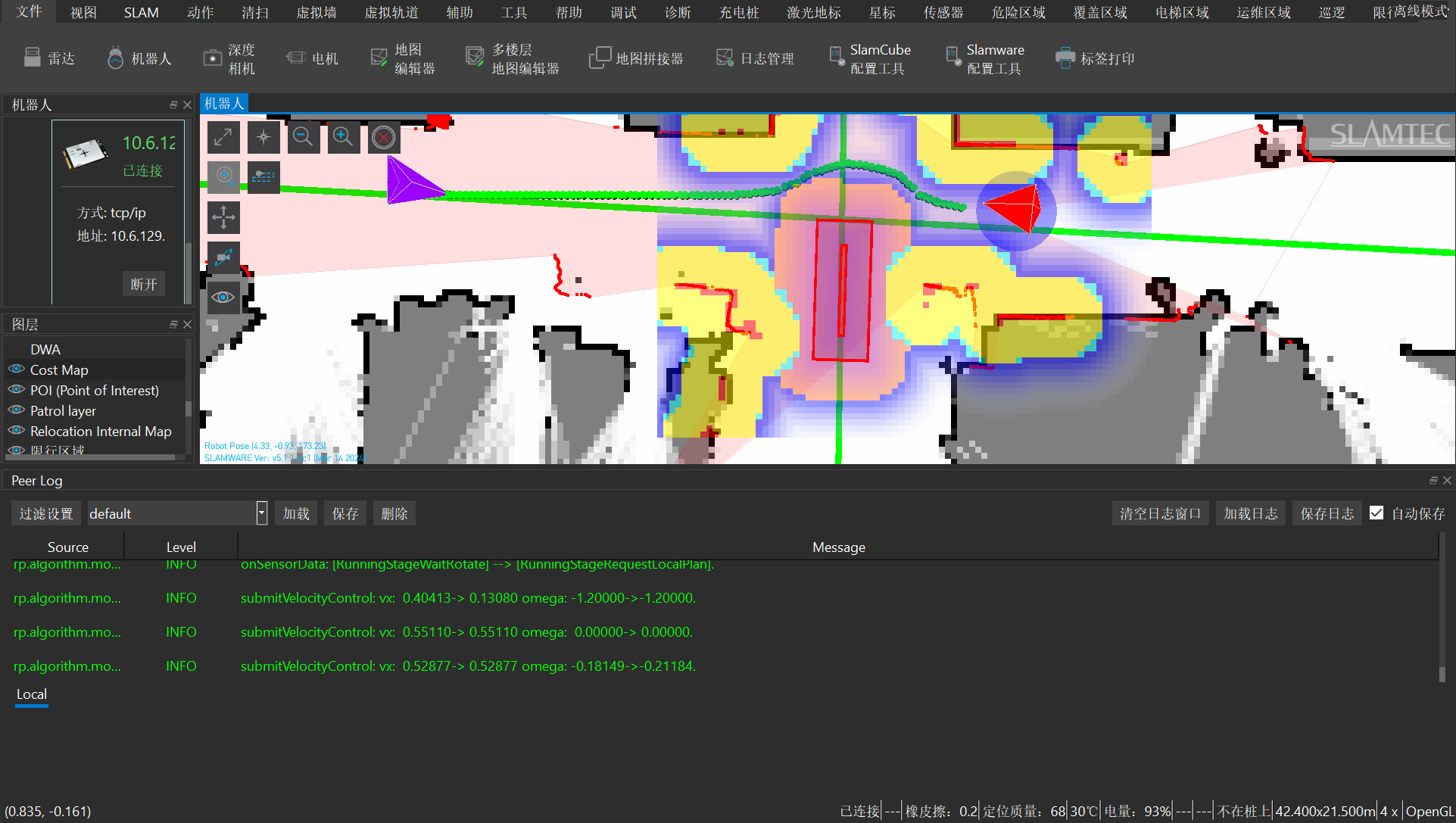
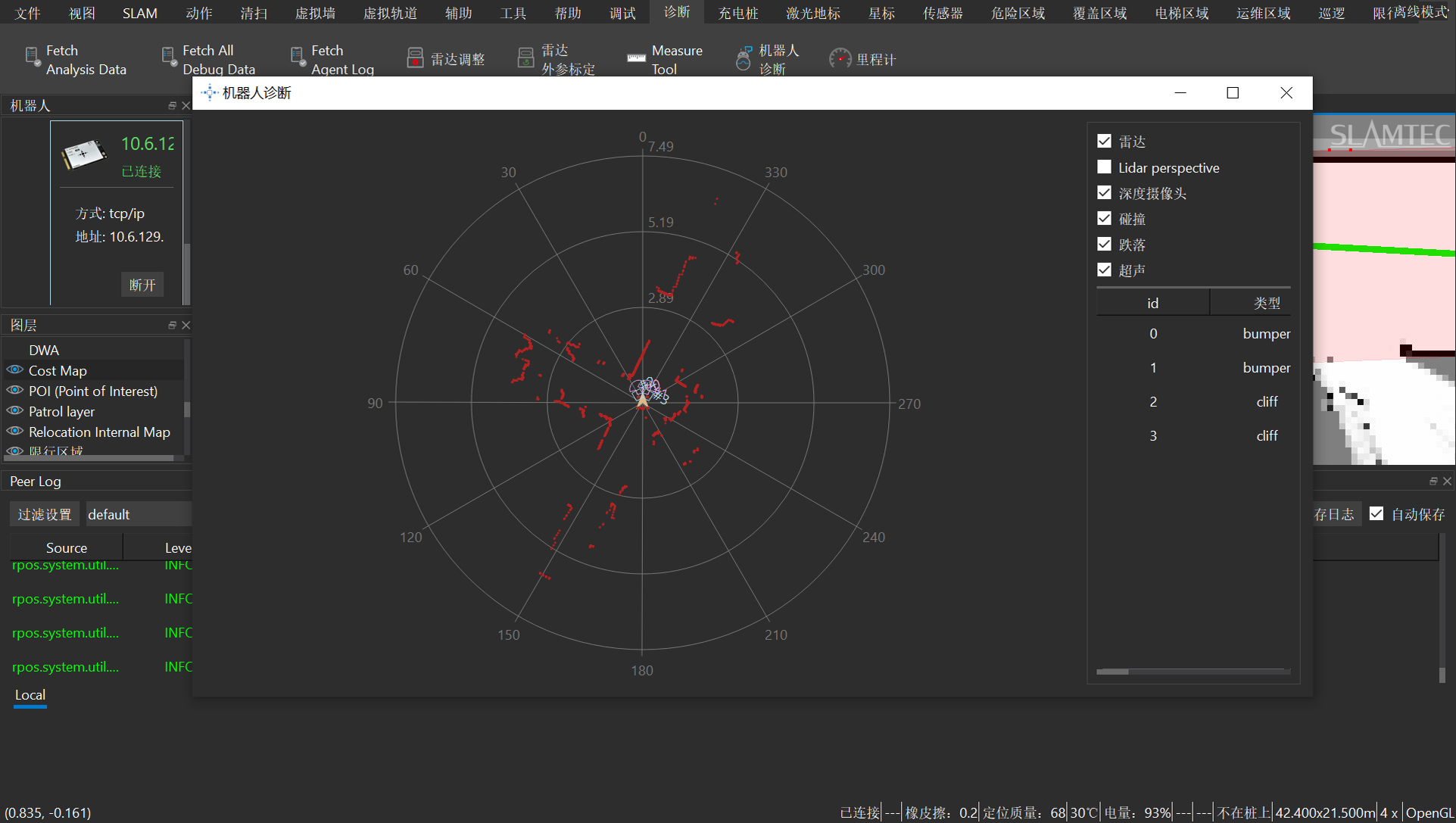
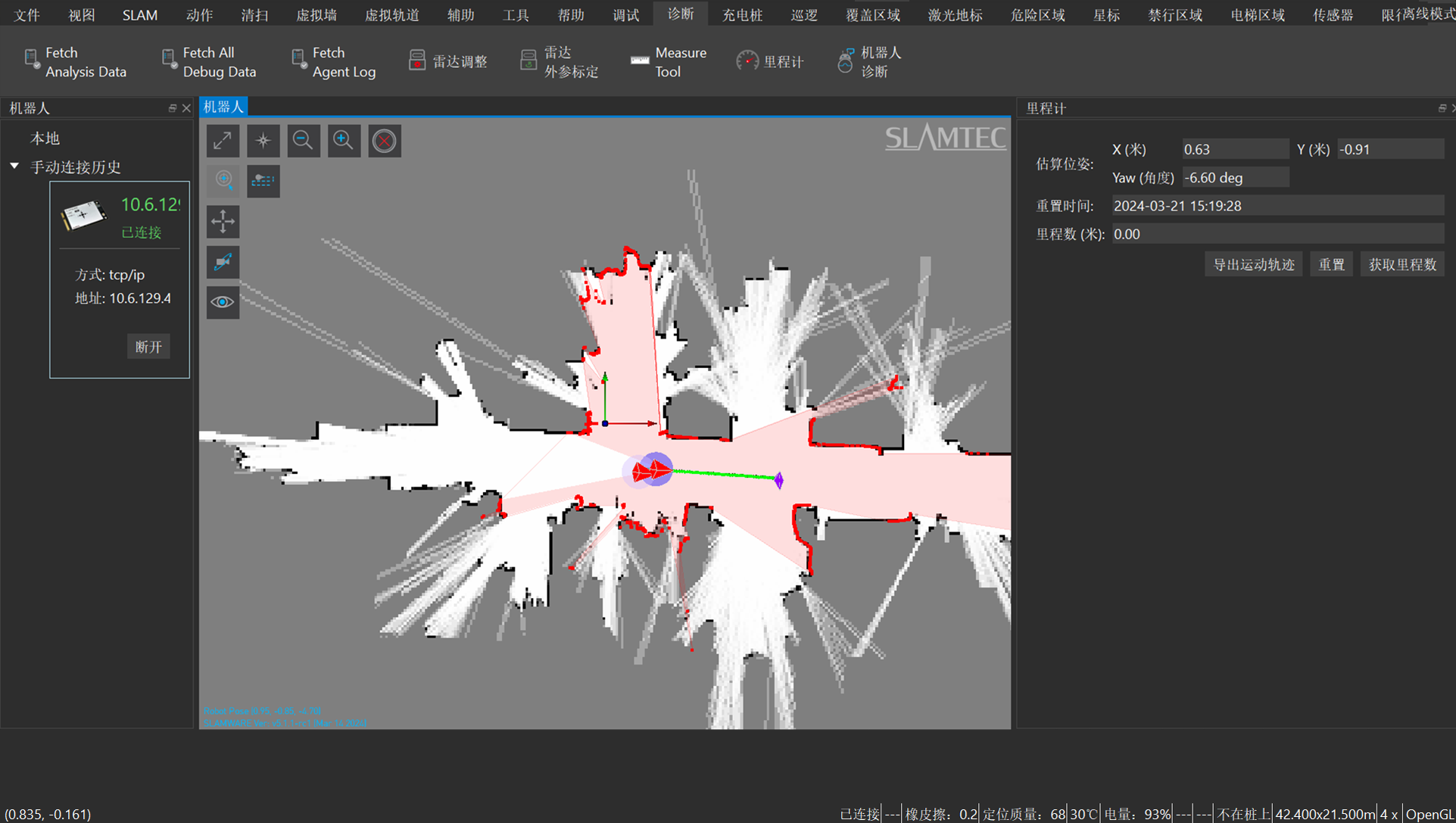
RoboStudio通过与机器人建立通讯,从机器人提供的接口获取其传来的传感器数据、位姿状态、地图信息等对数据信息进行再次处理后,通过友好的界面呈现给用户,也可通过RoboStudio对移动机器人发送指令,实现对机器人的可视化管理。

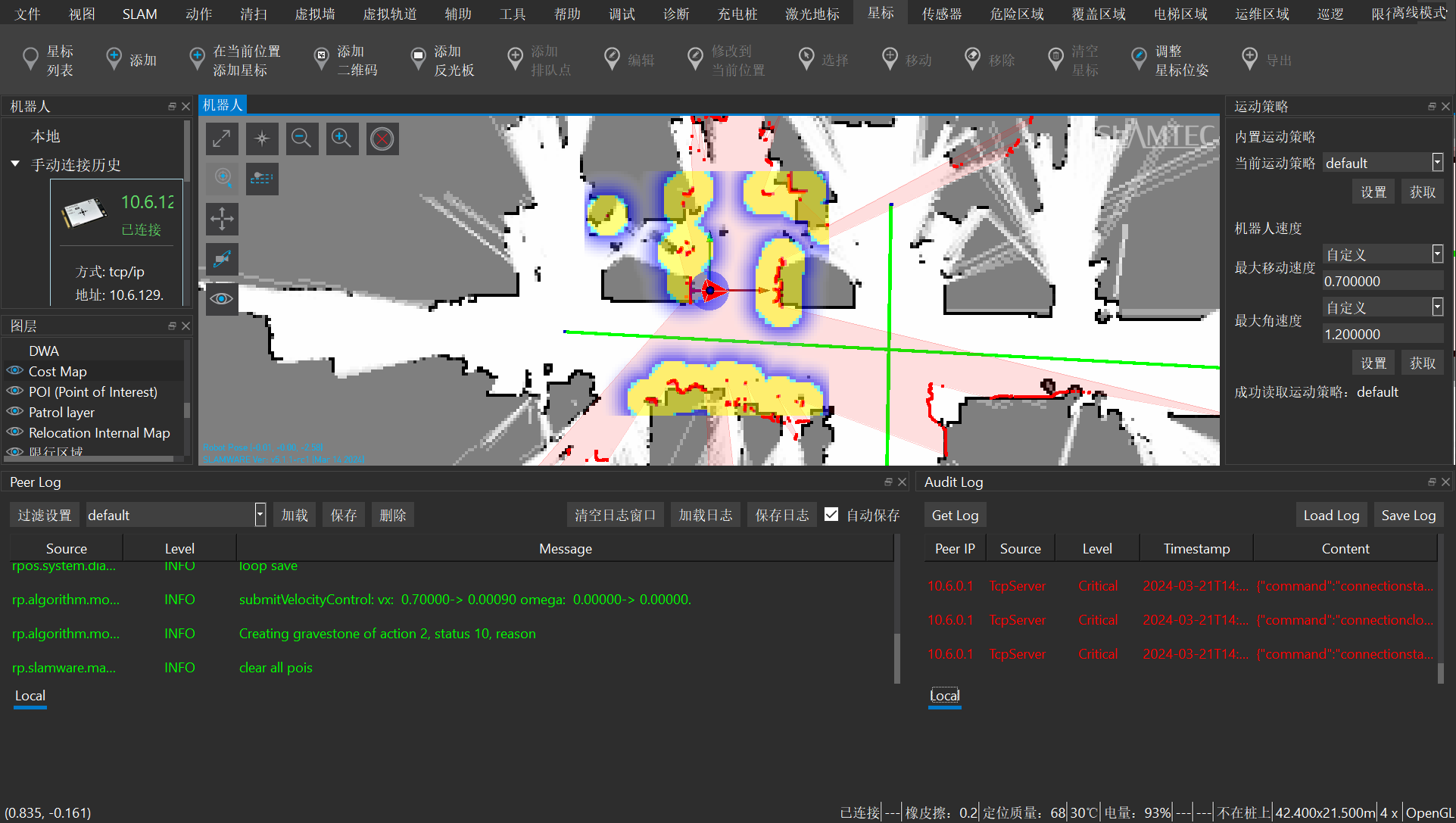
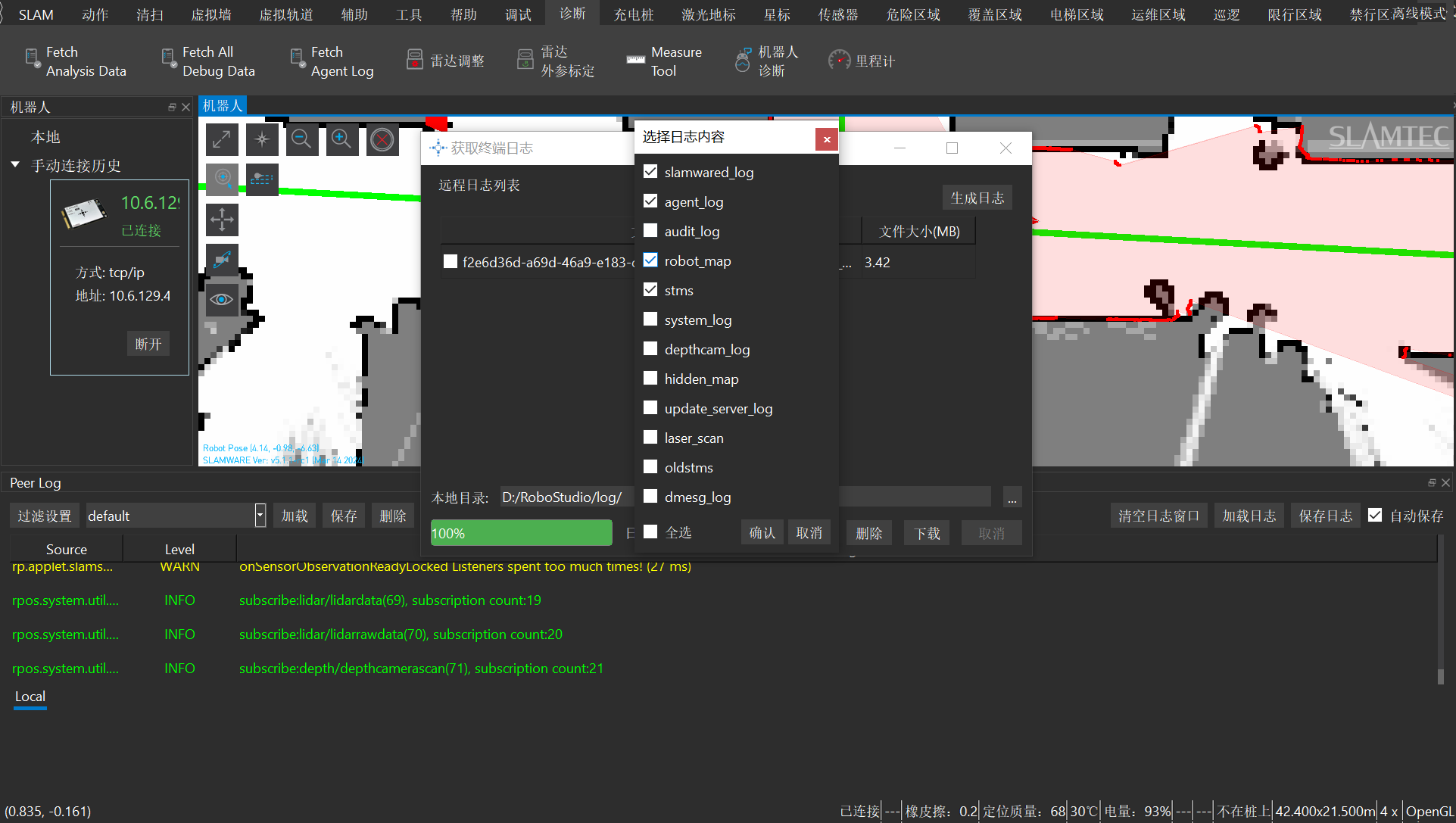
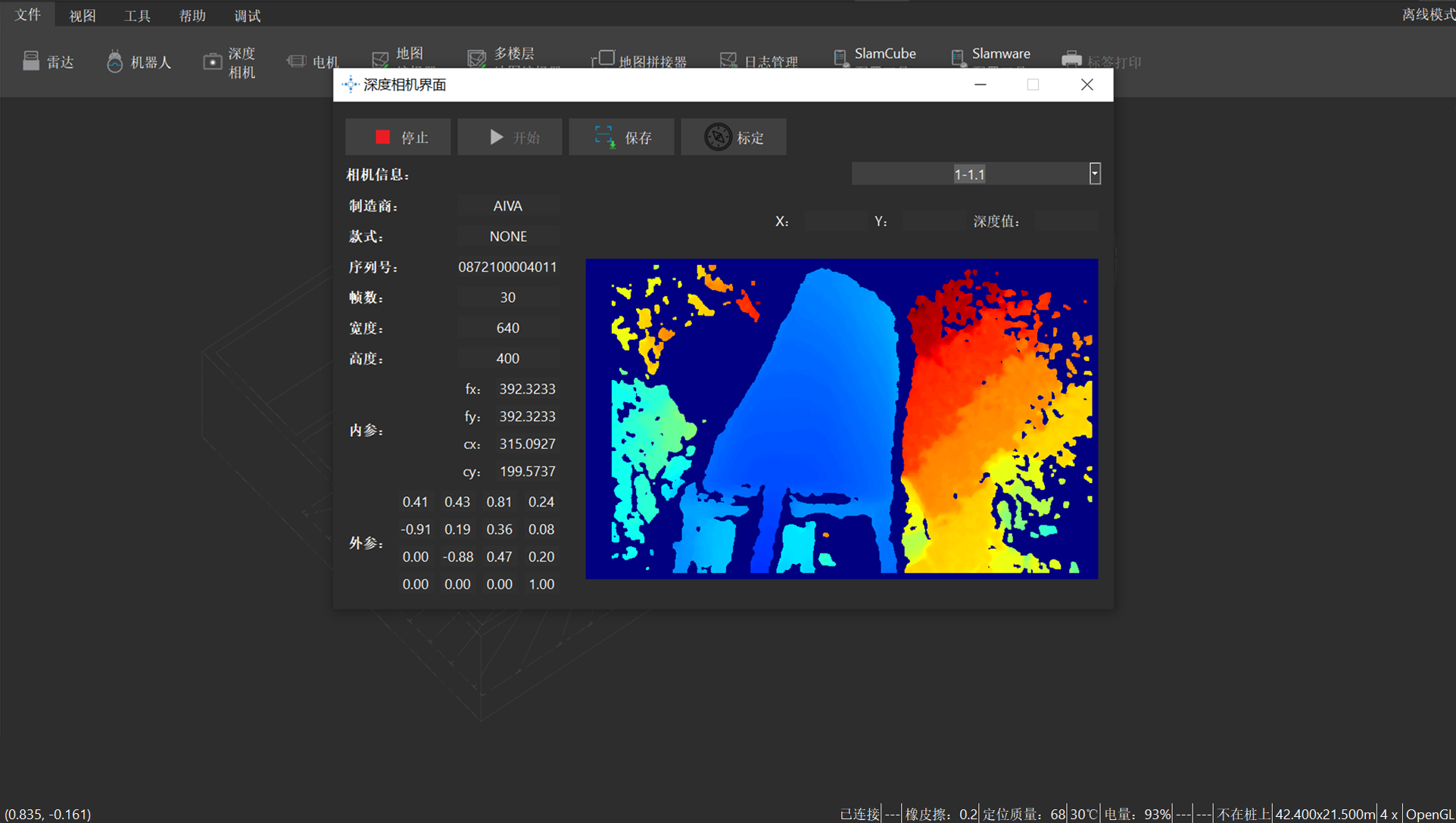
支持根据不同应用场景需求,灵活修改运动参数设置。同时提供强大的日志下载功能,方便您对机器人运动中的数据进行分析和调试。


界面友好易上手
强大的功能支持

多种视角模式随意切换
图层模式可加减观察对象

灵活运用插件,满足不同的场景应用
开放插件接口,供开发者开发定制插件

支持SLAMTEC所有型号器人
兼容SDK接口



思岚科技官方微信